

End-of-Week Spacewalk on Tap for ISS Crew ahead of Sunday Module Relocation
The International Space Station is entering a busy period of EVA and robotic operations on Friday to facilitate upgrades of the Station’s external command & control architecture, relocate a docking module for future commercial crew traffic and complete a number of outfitting tasks such as upgrading the Station’s external vision with HD technology, maintaining the robots outside the complex and restoring connectivity to external payloads.
These operations will be accomplished with a series of three spacewalks and extensive robotics spanning over two weeks before the end of ISS Expedition 50 comes on April 10 with the homecoming of the Soyuz MS-02 spacecraft. The schedule for the EVAs has been rather fluid given persistent delays with the Cygnus OA-7 cargo mission that was expected to arrive at ISS while operations were ongoing. Currently, the EVAs are planned for March 24, March 30 and April 6, however, the third EVA is contingent on Cygnus as it carries equipment needed for that particular spacewalk.

The EVAs will be handled by all three U.S. Segment crew members who will rotate EVA roles for each of the three excursions. Expedition 50 Commander Shane Kimbrough and Flight Engineer Peggy Whitson and Thomas Pesquet already completed a pair of EVAs in January dedicated to extensive battery replacement work on the Station’s Starboard Truss Segment.
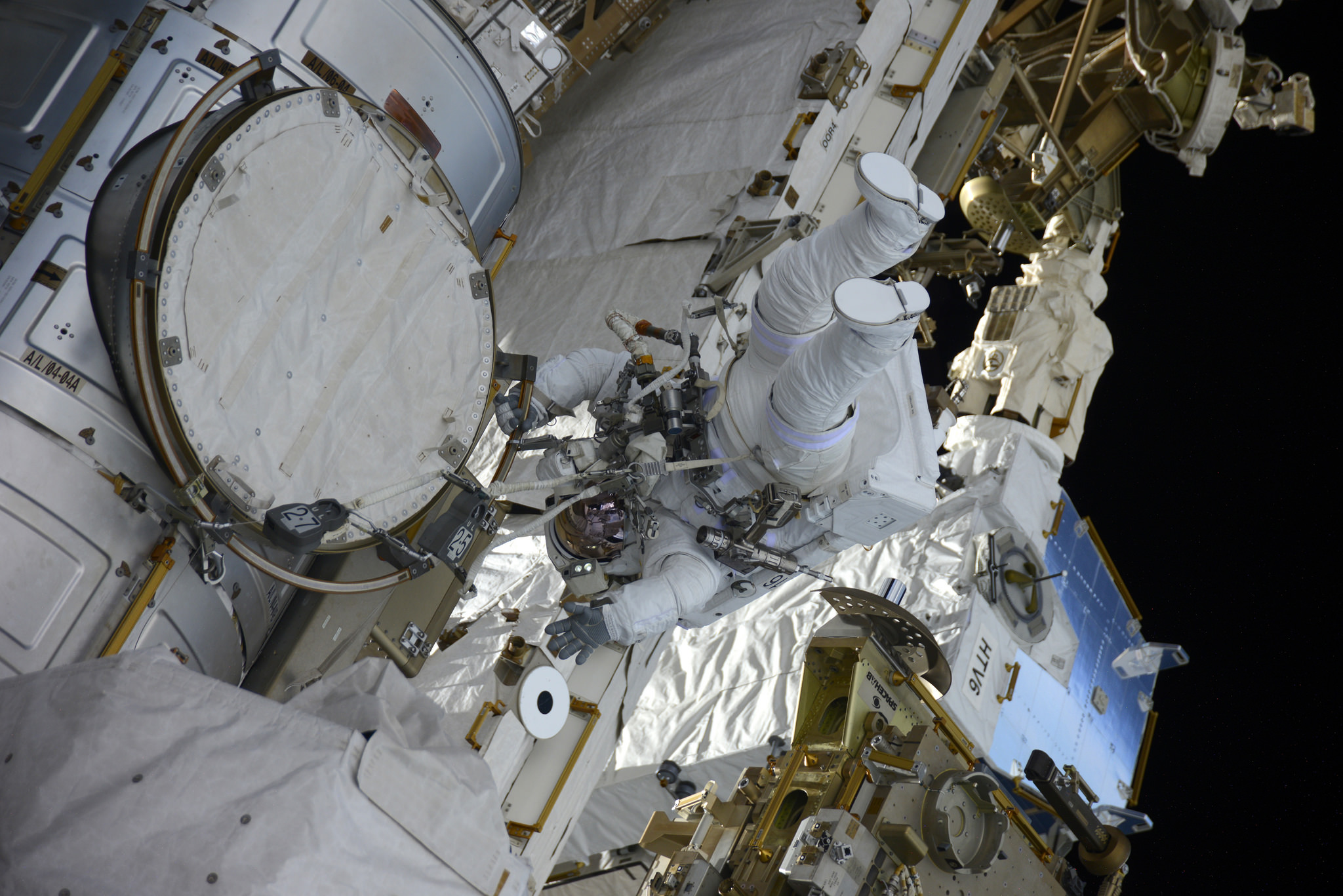
Kicking off operations on Friday will be spacewalkers Shane Kimbrough and Thomas Pesquet, scheduled to exit the Quest Airlock at 12 UTC on what is planned to be a six-and-a-half-hour spacewalk primarily dedicated to the installation of an external computer box, maintenance of the Dextre Robot and preparations for the relocation of Pressurized Mating Adapter 3 to give the Station a second docking port for Commercial Crew Vehicles expected to begin flying next year.
Pressurized Mating Adapter 3 will be detached from Node 3 on Sunday in an elaborate robotic operation that will last throughout the day to move the two-meter long module over to its new slot on the Harmony module where it will welcome future crews arriving on Dragon and Starliner spacecraft.
PMA-3 Relocation

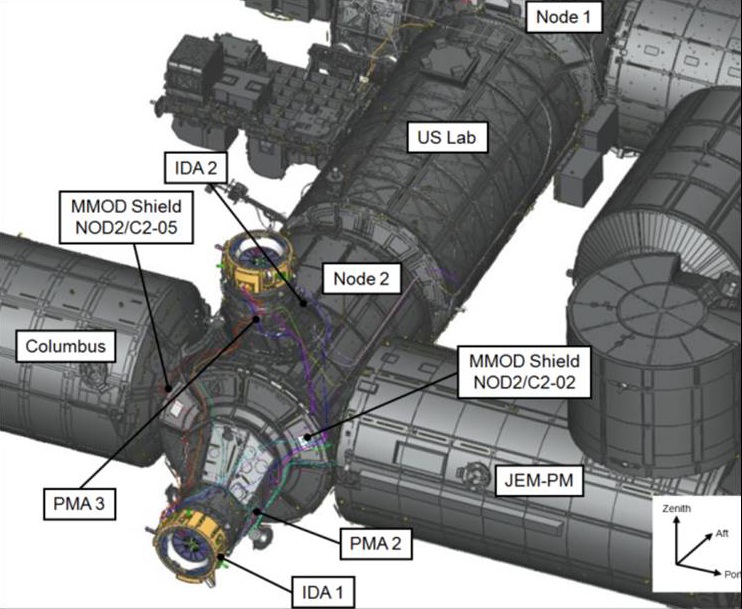
The Space Station has a total of three Pressurized Mating Adapters (PMAs) – PMA-1 launched in 1998 as one of the first U.S. components of the Space Station to build the interface between the U.S. and Russian Segments, connecting the Zarya and Unity modules. PMA-2 launched along with PMA-1 and Unity and eventually became the primary docking port for the Space Shuttle – initially residing on the forward end of the Destiny Laboratory before taking its current spot at Harmony Forward.
PMA-3 arrived in 2000 and spent its initial tenure at the Earth-facing side of the Unity module where it welcomed a pair of Space Shuttle missions in 2000 and 2001, the only Shuttle flights to utilize PMA-3 as a docking port. Over the years, PMA-3 was relocated multiple times – first to Unity port in 2001, then back to Unity nadir in 2007, back to port in 2009 and to Harmony Zenith in January 2010 to make room for the Tranquility Node Module. After Tranquility was activated, PMA-3 took its current spot on the Port Common Berthing Mechanism.
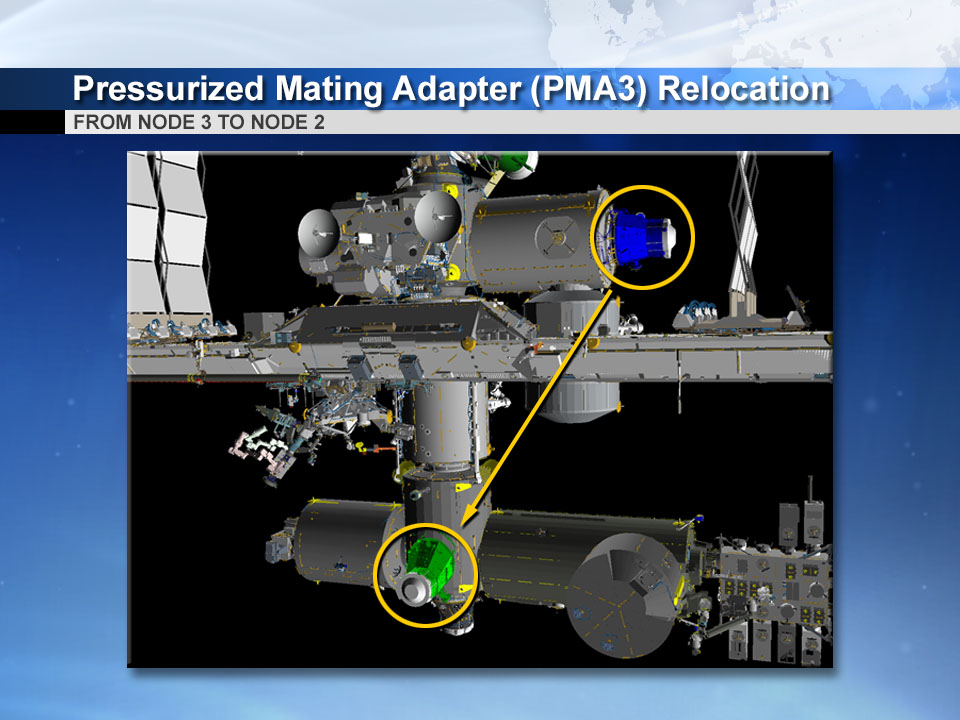
Having enjoyed a mostly dormant stay over the last decade, PMA-3 served as closet space for rarely used hardware items with the crew opening up the module only a few times a year to access stowed equipment and inspect the interior of the module. With the desire to establish a pair of docking ports for SpaceX’s crewed Dragon spacecraft and Boeing’s Starliner, PMA-3 is set for another relocation to join PMA-2 at the Harmony module with PMA-2 remaining in its forward position and PMA-3 headed to the zenith (space-facing) slot.
The PMA’s are cone-shaped and weigh between 1.2 (PMA-3) and 1.6 metric tons (PMA-1), measuring 1.86 meters in length and 1.9 meters in diameter at the wide and and 1.37m in diameter and the narrow end. On one end, the PMAs host a passive Common Berthing Mechanism 1.3 meters in diameter while the other end hosts an 0.7-meter APAS docking mechanism (Androgynous Peripheral Attachment System) compatible with the Space Shuttle and the Russian Zarya module.
To enable the PMAs to welcome Commercial Crew vehicles, they are outfitted with International Docking Adapters that convert the APAS docking port to the International Docking Standard utilized by Dragon, Starliner and NASA’s Orion spacecraft. This standard is freely available to any interested party and could enable ISS and future spacecraft to be compatible with a variety of international craft.
The first IDA lifted off aboard a Dragon spacecraft in June 2015 but failed to reach orbit when the Falcon 9 rocket encountered a catastrophic launch failure just over two minutes into its climb. The second IDA, taking the spot of the planned IDA-1, launched in July 2016 aboard the SpX-9 mission and was installed and outfitted as part of a series of EVAs the following August. IDA-3 is currently expected to launch early next year to take its spot on the relocated PMA-3 to give ISS two ports for direct handovers between Commercial Crew Vehicles, each transporting four resident crew members to and from ISS.
Preparations for the PMA-3 relocation began on March 3 when the crew ingressed the module and removed stowage items and scavenged the Intermodular Ventilation Valve of Node 3 Port to be available as an onboard spare. They also replaced three existing Bulkhead Feedthroughs to prepare Node 3 for future utilization including wireless data transmission for payloads residing at Node 3.
The crew installed four Controller Panel Assemblies to drive the 16 bolts on the active CBM side to demate the PMA-3 module for its relocation. They also put in place the Central Disk Cover to protect the Node 3 hatch once PMA-3 is removed and installed an external antenna communications cable for future use.
To finish the preparation of PMA-3 for its relocation, four external power and data cables connecting the PMA to ISS systems have to be disconnected and stowed out of the way. This requires an EVA to be performed in preparation for the robotic relocation of the module that is expected to be completed between EVAs #40 and #41 so that these connections can be re-done in PMA-3’s new location during the second EVA.
EPIC MDMs
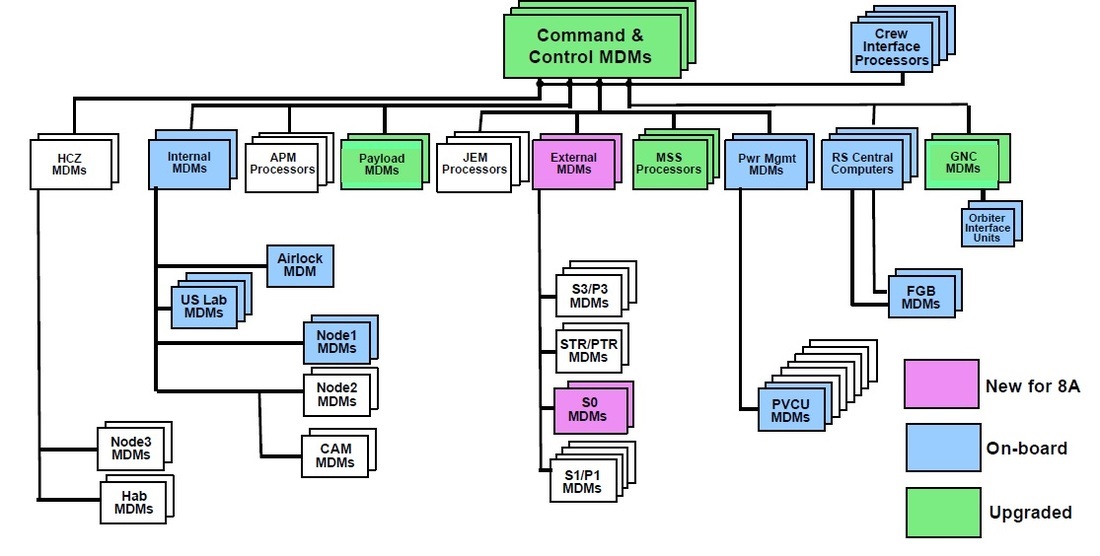
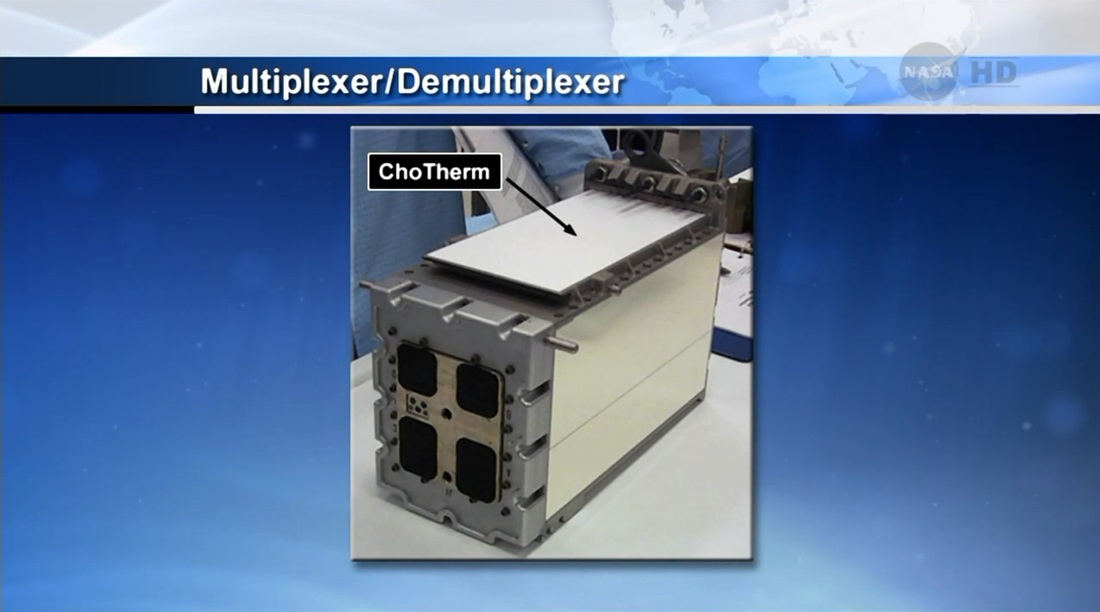
The second central task of U.S. EVAs #40 and 41 is the replacement of a pair of external computer boxes known as Multiplexers/Demultiplexers or MDMs for short. MDMs are found inside and outside the ISS and, with their associated data network, build the brain and nervous system of ISS, responsible for command and control of all the Station’s systems as well as the communication in between the systems and with the crew and ground through a series of interfaces. ISS uses close to 50 Multiplexers-Demultiplexers which, in essence, consists of a stack of avionics cards customized for each MDM’s function.
The MDMs provide commanding and control to all systems and return telemetry for downlink to the ground. Commanding of ISS is accomplished through the MDMs that are controlled via ground commands or crew input into laptops connected to the MDMs.
Building the backbone of the Station’s Command and Control System, the MDMs are needed to control all functions of ISS including power generation & distribution, attitude control & navigation, environmental control, communications with the ground, monitoring & commanding the various scientific payloads, and handling data collected by the different systems including basic telemetry data, complex scientific data or video from the payloads.
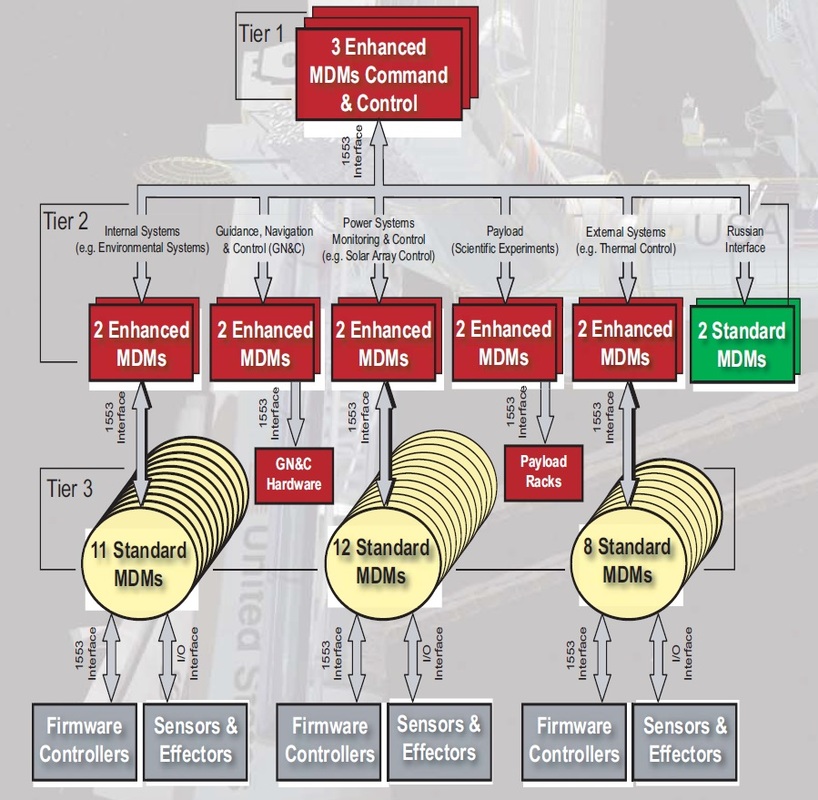
The Command & Control System of the Station employs a hierarchical design approach using three tiers of command systems going down from a control to a local and to a user level. Commands and telemetry flow sequentially through the tiers that use specific MDMs built to fulfill a certain task. There are several types of MDMs holding a different number of input/output cards and in recent years an effort was underway to enhance the Station’s command and control system by introducing what is known as the EPIC MDM, utilizing Enhanced Processor & Integrated Communications which give the MDMs faster computing power, increased memory and an Ethernet interface, taking the Station’s computer technology into the 21st Century.

Over the last five years, numerous internal MDMs were upgraded to the newer standard and U.S. EVAs #40 / #41 are set to take the EPIC MDMs outside. Two external MDMs, known as the S0 MDMs, will be replaced with new EPIC units which were fabricated in orbit back in January by the Station’s crew who fit an existing MDM housing with new circuit cards and Ethernet interface in readiness for its installation on the exterior of ISS.
To keep the S0 External Control Zone MDMs in operation, only one will be replaced during each of the two EVAs in order to allow the newly installed unit to take over duties before the second is removed on EVA-41. The S0 MDMs are Local MDMs responsible for a number of ISS systems including the Mobile Transporter, Thermal Control System, Secondary Power System and Solar Alpha Rotary Joint as well as a series of external payloads.

The external EPIC upgrade is needed to enable ISS to fully utilize the C2V2 Common Communications for Visiting Vehicle System that will be used by Commercial Crew vehicles on approach to the ISS to relay crew voice, vehicle telemetry and navigation data. The new MDMs will also allow more external systems to be supported given the greater processing capability of the EPIC processing units.
Each external MDM features two secondary fasteners for structural attachment plus a center screw used to attach the MDM enclosure. Electrical and data connectors have a blind-mate design – they are automatically connected via the rear of the MDM when the unit is installed on its coldplate guided by rails & fasteners. The EPIC MDMs have Ethernet Interfaces requiring additional cables to be connected to the MDMs in addition to the blind-mate connectors.
Ethernet cables for the new S0 MDMs were routed as part of a number of recent U.S. spacewalks and the only step remaining is the actual MDM replacement and connection of the cables.
EVA-40 Procedure

U.S. EVA-40 will be carried out by Expedition 50 commander Shane Kimbrough, a veteran of four career EVAs for a total of over 25 hours, and ESA Astronaut Thomas Pesquet who completed his first spacewalk in January, spending nearly six hours outside the ISS. The two will utilize Extravehicular Mobility Units #3006 and #3008; Kimbrough’s suit will have red stripes while Pesquet will wear an all-white EMU.
The two crew members will press on with final EVA preparations Friday morning, donning their EMUs assisted by Peggy Whitson and one of the Russian crew members before heading into 100 minutes of pre-breathe and light exercise. After final suit outfitting and SAFER installation, the EV crew members will move into the small crew lock section of Quest for depressurization ahead of the opening of the hatch which will be handled by Thomas Pesquet.

Once both Astronauts are outside, they will go through a series of suit checks and verify their tools before they part ways. EVA-40 will see the two working on different tasks for the entirety of the spacewalk, requiring a high-degree of coordination between the ground and the two crew members to keep track of activities in progress at each of the worksites.
First up for Shane Kimbrough will be the MDM replacement on S0, requiring him to use his Pistol Grip Tool to remove a pair of secondary bolts and a central jacking bolt to demate the MDM. He will then conduct an inspection of the MDM and its receptacle with special focus on the Chotherm material between the MDM and its cold plate to ensure the coldplate is clean before putting the new MDM in place.
Using guide rails, Kimbrough will soft dock the MDM and drive the center jacking bolt followed by the two secondary bolts. He will then retrieve one of the Ethernet cables pre-staged inside the S0 truss and route it over to the MDM for connection followed by a checkout by Mission Control later in the EVA.
Kimbrough’s next task will be to move over to the PMA-3 module where he will disconnect four power and data umbilicals and tie the cables down on the Node 3 module to make sure the removal of PMA-3 can go ahead with no interference.
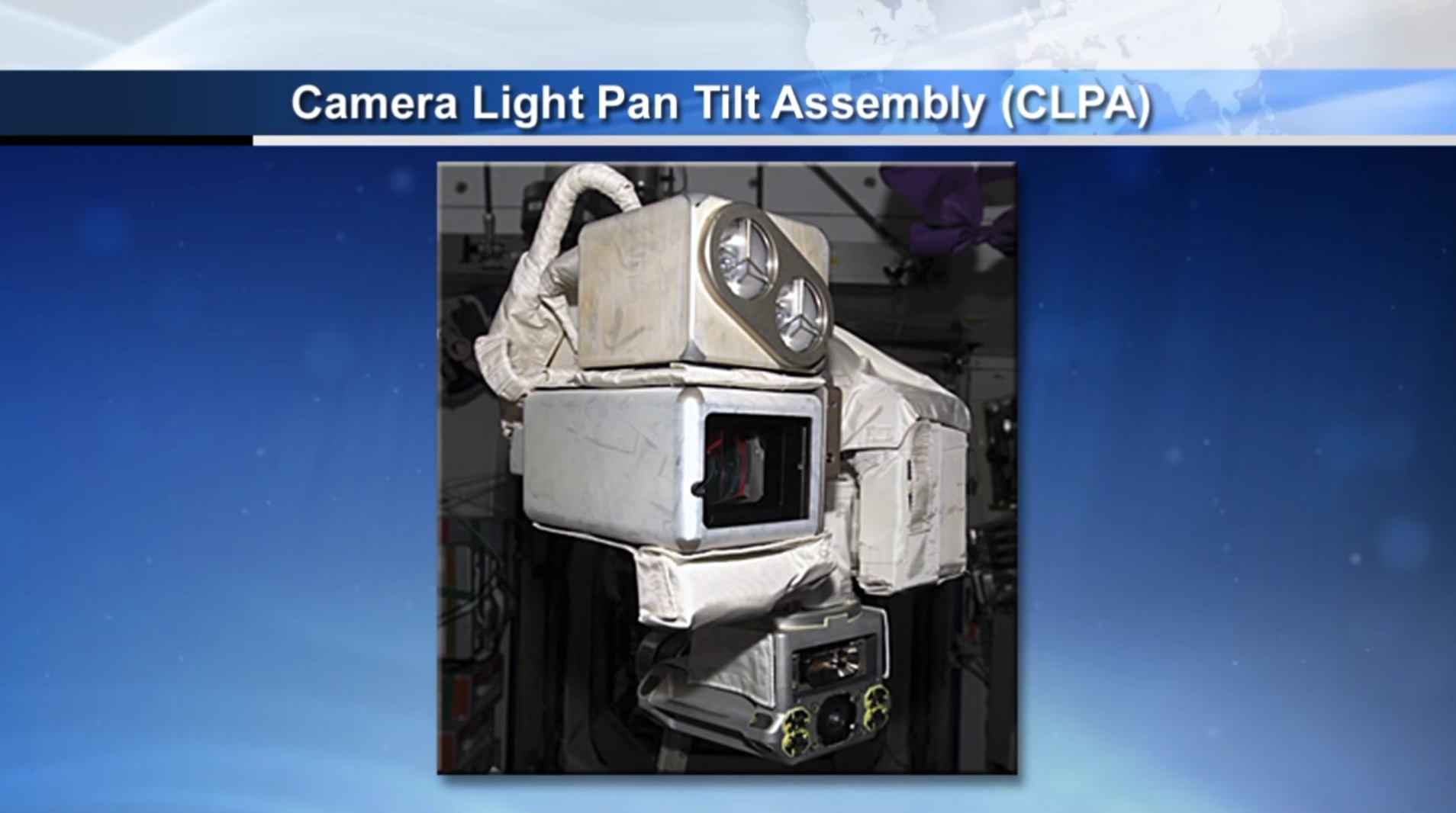
Once complete with that task, Kimbrough will move to the Exposed Facility of the Japanese Kibo module where he will replace a pair of Camera/Light Pan/Tilt Assemblies that have failed lights and will be brought back inside ISS for replacement of the failed light sources.
The first camera is located on the Japanese Remote Manipulator System and will require Kimbrough to use his Pistol Grip Tool to release one structural bolt before removing the camera and soft-docking the spare unit and driving its structural bolt. The second camera resides on the outboard side of the Exposed Facility and will be replaced in the same fashion.
Thomas Pesquet’s EVA starts with a brief translation over to External Stowage Platform 2 where he will retrieve an Articulating Portable Foot Restraint (APFR) and an extender for said restraint that he will both carry over to the P1 Truss Segment where he will set up shop.
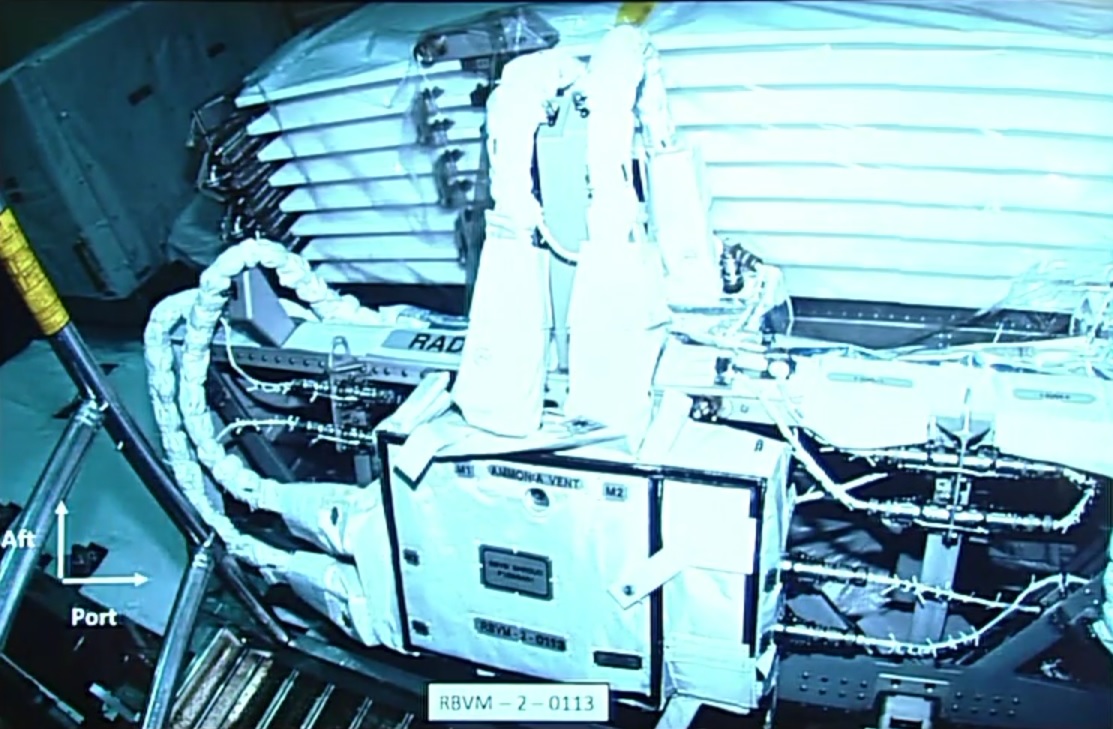
Once the APFR is installed, Pesquet will ingress it for a close inspection of the Radiator Beam Valve Module (RBVM) P1-3-2 – a component within the External Active Thermal Control System (EATCS) Loop B, one of two main cooling channels of the Space Station. Loop B was the focus of a robotic examination in February using the Robotics External Leak Locator (RELL) to search for a small leak within the cooling loop as indicated by falling ammonia accumulator quantity within Loop B.
The inspection identified this particular RBVM as a candidate location for a leak, however, human eyes are needed for final confirmation. To that end, Pesquet will complete a visual inspection of four flex hoses, fluid Quick Disconnects on the RBVM and rigid lines for any signs of leaking ammonia that would be evident in smaller or larger ‘snowflakes’ of frozen ammonia.
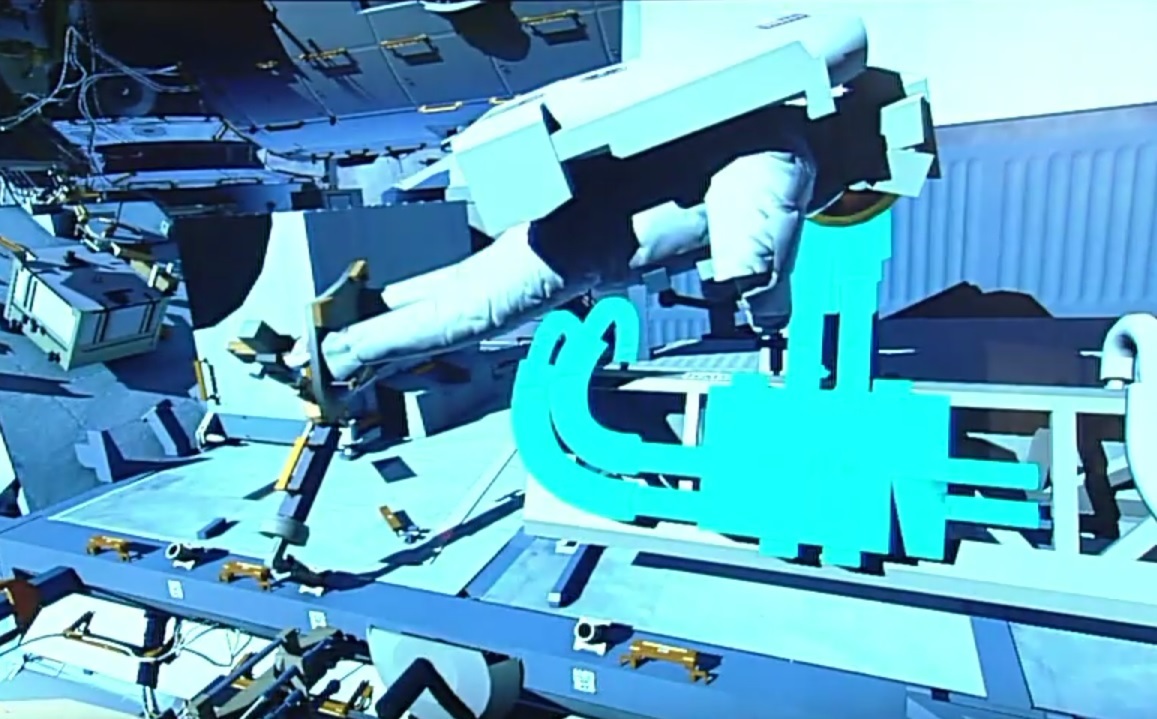
After the inspection, Pesquet will take his foot restraint to the S0 truss and ingress it to face the Dextre robot riding on the end of Canadarm2. Peggy Whitson will be standing by at the Robotics Workstation inside ISS to maneuver Dextre within reach of Thomas Pesquet to complete lubrication of one of Dextre’s Latching End Effectors (LEE).
The LEE lubrication task was previously carried out on the end effectors of Canadarm2, a tedious and time-consuming operation given the vastly restricted access to many of the areas that need to be lubricated in order to extend the life of the LEEs which are critical components for the robots as they are responsible for grasping the various objects handled by the Station’s robotic duo.
The LEE lubing operation is a task that was not envisioned to be done in space, requiring some ingenuity and improvisation to come up with a new tool known as the BLT, Ball-Screw Lubrication Tool – essentially a cradle on an extended grip to allow grease to be transported into the LEE. Having to work only based on what he feels through his EVA gloves, Pesquet will conduct a few practice runs without grease to get a feeling for the bolts hidden inside the LEE.
Pesquet will then begin with the central ball screw of the LEE, applying Lube to the BLT cradle and moving it into the center of the LEE where the largest bolt of the system resides. Next will be the four Latch Ball Screws that Pesquet can only access by feel and by using the depth finder on the BLT to transfer grease onto the screws.
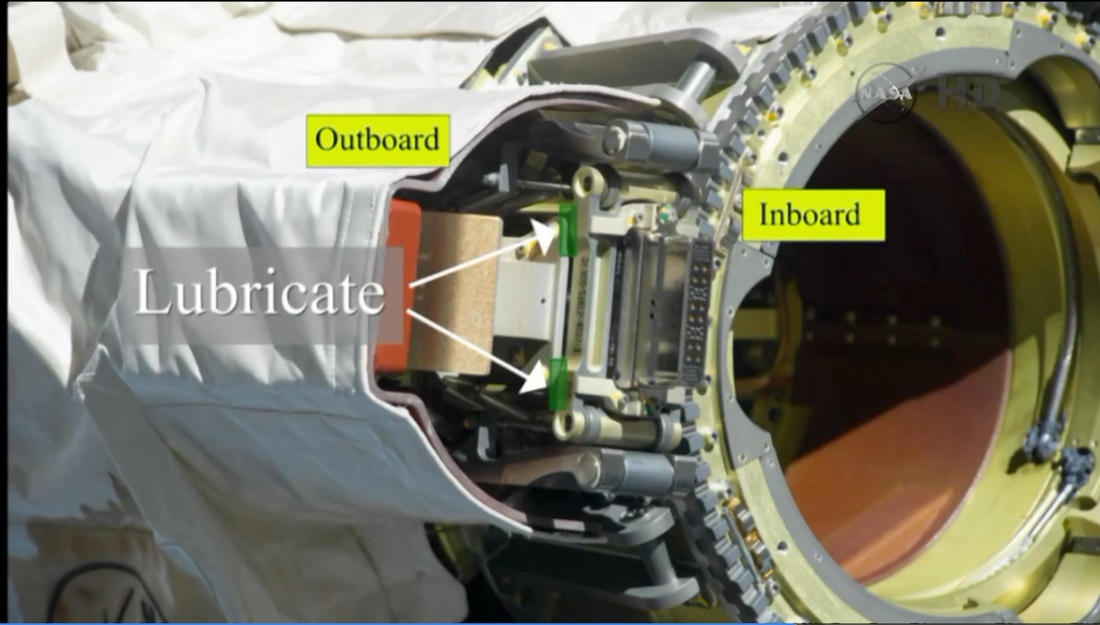
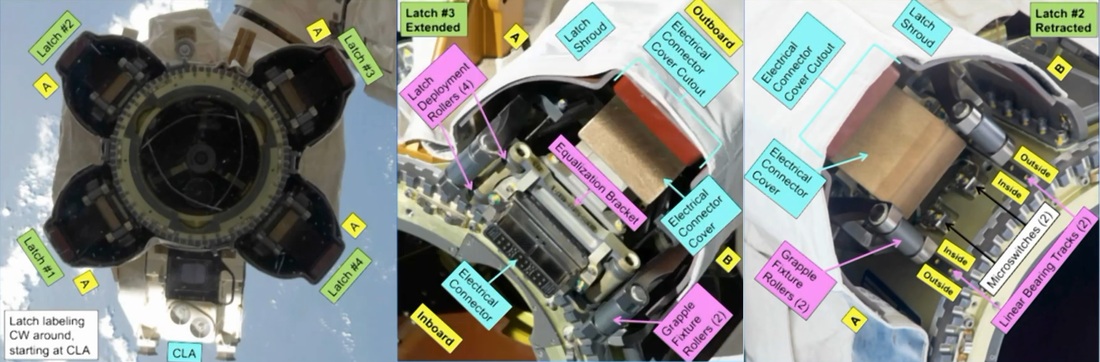
In between the individual lubrication tasks, the LEE will be rotated to ensure Pesquet can have good access to each of the screws. When all four have been lubricated, the latches on the LEE will be retracted to reveal the Linear Bearing Tracks on which the latches glide when being retracted and deployed.
Two tracks are part of each latch and lubrication is to be done on the inside and outside of each track amounting to a total of 16 locations to be lubricated. The tracks can be accessed directly with the grease gun, however some delicacy arises because Pesquet has to pay close attention not to touch or lubricate the microswitches residing in between the bearing tracks. Once all components are exercised once, he will begin the last round of lubrication – using the grease gun to directly put a dab of grease in front of the brackets and rollers to be distributed when the LEE is actuated.
Pesquet will clean up the worksite and stow the foot restraint before going back to the airlock to meet up with Kimbrough, either to continue with get-ahead tasks or closing out the spacewalk depending on the elapsed time at this point. A number of get ahead tasks are available to the crew including those of the upcoming two EVAs that are not too time-consuming.
Future Work
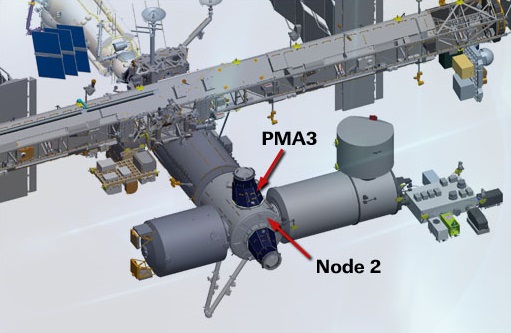
Having prepared PMA-3 for its relocation, the crew hands duties off to ROBO specialists in Mission Control who will use the Station’s robotic arm on Sunday to move the large module to its new location. The task of moving PMA-3 will begin with its detachment from Node 3, requiring for groups of four bolts to be driven open followed by the release of four capture latches to give Canadarm2 full control of the module.
The move from Node 3 to Node 2 will be very slow and deliberate, at least in its initial stages due to extremely tight clearances in the first robotics sequence to unberth the module and move it away from Tranquility. Installation on Node 2 Zenith will be the reverse process of the module’s removal with ROBO controllers using the Centerline Berthing Camera System to precisely align the module before closing capture latches and driving the Common Berthing Mechanism Bolts.
Heading outside on March 30 will be Shane Kimbrough and Peggy Whitson on the second of three planned EVAs. U.S. EVA-41 will include three major tasks – the outfitting of PMA-3 in its new location by installing protective shields, routing and connecting a series of cables and pre-staging cables for the International Docking Adapter, the Lubrication of the second Latching End Effector on the Dextre robot and the replacement of the second S0 MDM with the upgraded EPIC unit.

EVA-42, tentatively scheduled for April 6, will be completed by Whitson and Pesquet and comprises a number of small tasks: the replacement of an ExPRESS carrier avionics (ExPCA) unit on Express Logistics Carrier 4, a photographic survey of the Alpha Magnetic Spectrometer 2, the installation of HD cameras on the starboard truss of ISS and the installation of a wireless communications antenna on the Earth-facing side of the Destiny laboratory.
Whether EVA-42 can be performed before the upcoming crew rotation will depend on the launch of the Cygnus OA-7 cargo spacecraft that was initially set for mid-March but was delayed repeatedly, most recently suffering an indefinite postponement when a hydraulic issue on the mission’s Atlas V rocket was discovered during re-testing of a hydraulic component that had been replaced within the launch pad ground system.
Cygnus OA-7 is carrying the ExPCA to be put in place during EVA-42 as well as a cable needed for a diagnostic test involving the AMS-2.
Should Cygnus stay grounded beyond an April 2 berthing at ISS, Mission Managers will re-assess the EVA plan and may elect to move EVA-42 into late April when the Soyuz MS-02 – MS-04 crew rotation will be complete. Soyuz MS-02 with Shane Kimbrough, Sergei Ryzhikov and Andrei Borisenko will depart ISS on April 10 after a 173-day stay, headed for a springtime landing in the Kazakh steppe. A two-man crew of Fyodor Yurchikhin and Jack Fischer is set for liftoff on the 20th and a six-hour fast-track rendezvous to replenish the ISS crew and bring the USOS crew contingent back to three as required for a non-critical EVA.
