

Cygnus Cargo Spacecraft Installed on ISS for Critical Supplies Delivery

The Cygnus S.S. Gene Cernan arrived at the International Space Station on Tuesday for a robotic capture and berthing to become a temporary part of the orbiting laboratory for the delivery of over three metric tons of supplies, maintenance gear and research. Cygnus enjoyed a particularly smooth flight after Sunday’s liftoff from Virginia’s Eastern Shore, arriving at the Station’s doorstep for a straight-up approach to the capture position to mark the start of a three-week stay at ISS highlighted by cargo transfers and a planned end-of-mission test to collect data for future Commercial Crew missions.
Cygnus took flight at 12:19:55 UTC on Sunday when its Antares launch vehicle lifted off from Pad 0A at the Wallops Flight Facility. Flying in its upgraded configuration for the second time, Antares fired its twin RD-181 engines for three and a half minutes, shed its payload fairing during a brief passive flight phase and burned its solid-fueled second stage for two minutes and 40 seconds to send Cygnus into orbit. Performance by the upgraded launch vehicle again surpassed the intentionally conservative simulations and placed Cygnus into a slightly higher orbit than planned.

The 6,200-Kilogram Cygnus spacecraft started out in an orbit of 300 by 331 Kilometers at the expected inclination of 51.63 degrees. Solar array deployment occurred after the vehicle made its first lap around the planet and Mission Controllers in Dulles, Virginia were able to give Cygnus a clean bill of health after initial checkouts in orbit. Within a few hours of launch, Cygnus completed its first large orbit-raising maneuver with its BT-4 main engine, lifting the apogee to 360 Kilometers.
More burns were performed on Sunday and Monday as Cygnus approached the Space Station from behind and below for initiation of the rendezvous when Cygnus was in an orbit four Kilometers below the Space Station’s 401 x 408-Kilometer orbit. When reaching a range of 28 Kilometers, Cygnus entered the relative navigation phase of the rendezvous, beginning to receive GPS data from the Space Station through a space-to-space communications link in order to compare it against its own GPS readings to obtain a more precise relative position fix.

Joint operations between Dulles and NASA’s Mission Control Center in Houston began before Cygnus was given clearance for its first Approach Delta-V Burn and a coelliptic maneuver that positioned the craft 1.5 Kilometers below ISS. Next was the Approach Initiation Maneuver that put the spacecraft on a path to intercept the Station’s R-Bar to arrive at a position around 350 meters straight below ISS.
Aboard the Station, ESA Astronaut Paolo Nespoli served as the robotics operator on Tuesday while Expedition 53 commander Randy Bresnik handled communications with the ground and commanding of Cygnus through the Hardware Command Panel. At a range of 250 meters, Cygnus hit the brakes to enter a planned hold dedicated to the transition from Relative GPS navigation to the craft’s Proximity Navigation System featuring a laser-based 3D sensor that captures 3D data of the target vehicle that is then compared with a computer model of the known shape of the target to deliver relative position, range and range rate measurements to guide the spacecraft to an on-target arrival.

The 250-meter hold was extended slightly, causing the rendezvous to drift around ten minutes behind schedule before the spacecraft was commanded into Approach Mode to advance to 30 meters. While Cygnus again held position, teams on the ground configured the spacecraft for final approach and the crew in orbit went through their procedure review before providing clearance for final approach. Gently firing its thrusters, Cygnus slowly covered the final 18 meters to the capture position, taking around 15 minutes.
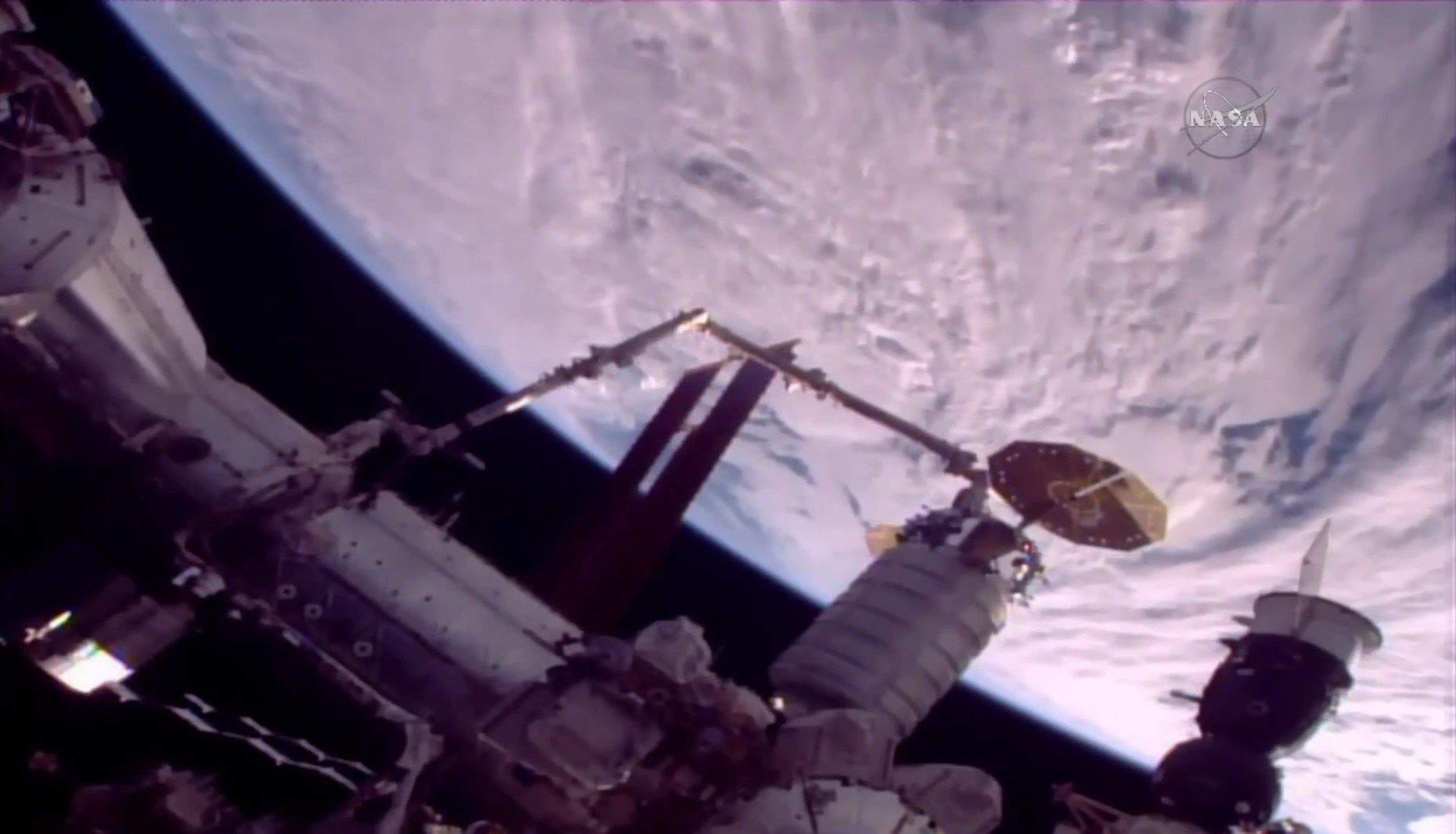
Arriving within reach of Canadarm2, Cygnus automatically reduced relative rates to hold perfectly still while the crew reconfigured cameras and took the brakes off the robotic arm in preparation for capture. Mission Control provided a GO and Paolo Nespoli began driving the arm into position over the grappling pin of the craft’s Power & Video Grapple Fixture with Cygnus moving into Free Drift just before capture. A good capture was confirmed at 10:04 UTC followed by engaging latches within the arm’s Latching End Effector to form a power and video bridge to Cygnus.

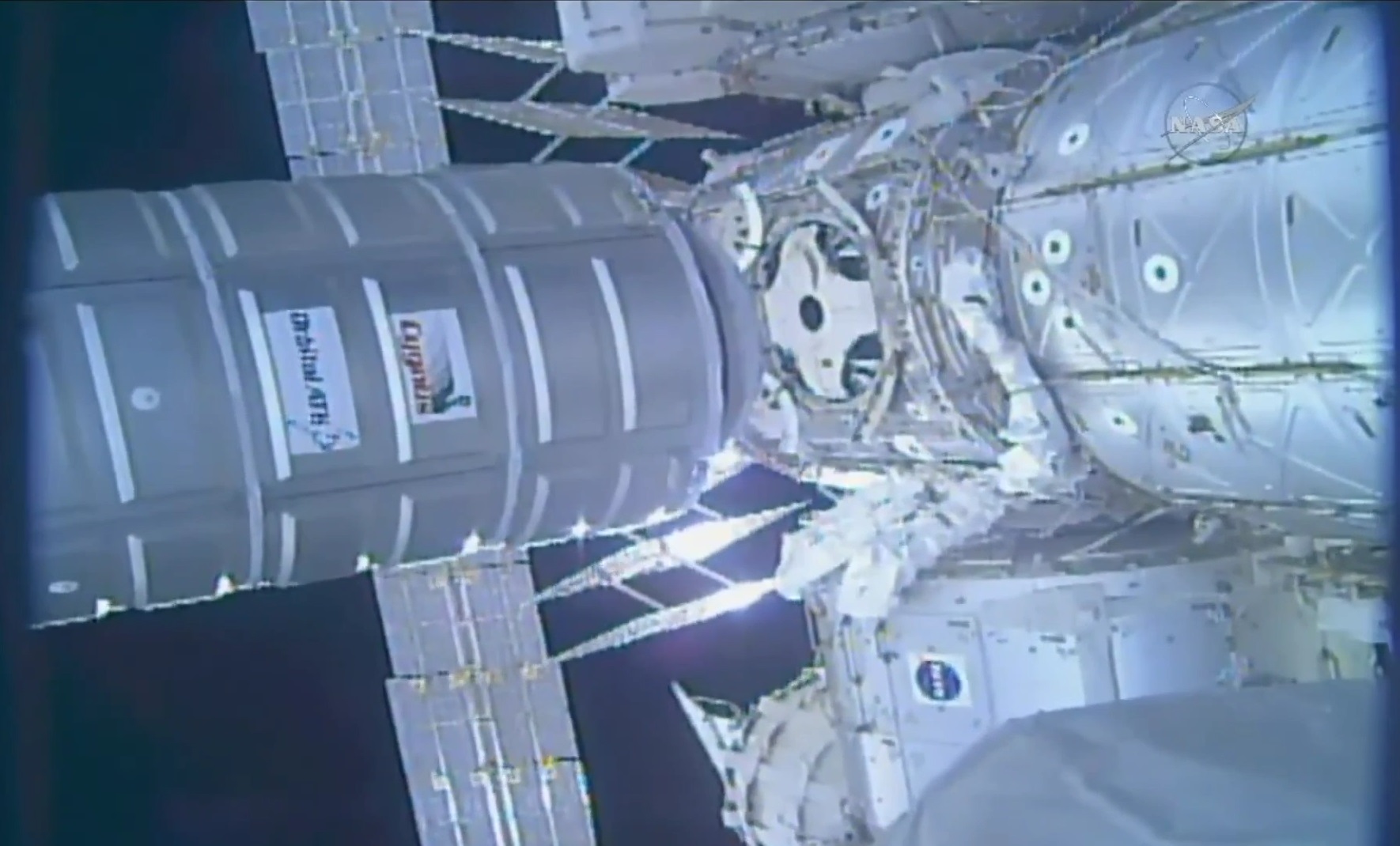
The crew then handed robotics off to controllers on the ground for the berthing operation which has become close to routine by this point. Moving swiftly through their procedures, ROBO controllers maneuvered Cygnus into its pre-berthing position on the Earth-facing Common Berthing Mechanism of the Unity Module. With the help of the Centerline Berthing Camera System, Cygnus was positioned with millimeter accuracy before capture latches were closed to establish first stage capture.
Four sets of four bolts were then driven to firmly pull Cygnus in and form a pressure seal between the Unity module and the spacecraft with second stage capture marked at 12:15 UTC. After final bolt-loading, the crew will be cleared to press into leak checks and outfitting of the vestibule between the two spacecraft before Cygnus can be opened for business with plenty of cargo transfers ahead for the four U.S. Segment crew members over the course of the next three weeks.
Cygnus OA-8 is the fifth U.S. resupply craft reaching ISS this year, coming after the OA-7 mission that launched on Atlas V and three science-heavy Dragon missions. In contrast to recent Dragons, cargo on the Cygnus is primarily comprised of supplies and systems hardware to ensure ISS can remain in a comfortable consumables situation. With the OA-8 cargo on board, ISS is looking good for supplies until June 2018 with food being the limiting consumable which is usually the case per standard ISS supply management.
Cygnus OA-8 is loaded with 3,229 Kilograms of pressurized cargo comprising 1,240 Kilograms of crew supplies including food provisions and clothing, 851kg of vehicle hardware, 740kg of utilization hardware including new experiments and materials for ongoing studies, and 166kg of spacewalk equipment and computer resources. Two powered polar freezers are installed aboard Cygnus, holding cold stowage items for biological experiments as well as fresh fruit and vegetables plus ice cream for the crew.

Hardware aboard the Cygnus includes replacement gas bottles for the Combustion Integrated Rack for upcoming research into combustion dynamics in microgravity, a Rodent Habitat to provide a home for the next Rodent Research mission flying on SpaceX, and parts for the Station’s 3D printer. Space Tango’s TangoLab module is set for a unique demonstration during this mission, taking up temporary residence aboard the Cygnus spacecraft to prove the feasibility of using the cargo module as an extension to the scientific modules of the Space Station.
Cygnus is also carrying a series of CubeSats – two are to be transferred to the Kibo module for installation in a NanoRacks deployer to be released via the Station’s Japanese Robotic Arm while Cygnus itself hosts a CubeSat deployer holding 14 satellites for deployment into an orbit around 100 Kilometers above ISS after Cygnus departs the Station.
Cygnus is booked for a short stay of just under three weeks, making for a fairly packed timeline for unloading the spacecraft and re-loading it with trash and no-longer-needed hardware. Unberthing is planned for December 3rd to position Cygnus for an overnight session of radio and GPS testing to verify Commercial Crew vehicles arriving and departing the Harmony module can do so without radio interference. Released on December 4th, Cygnus will be guided into the CubeSat deployment orbit above ISS and then conduct maneuvers toward a destructive re-entry over the Pacific to close out its mission.
