
OSIRIS-REx TAGSAM
Touch-And-Go-Sample Acquisition Mechanism
The OSIRIS-REx mission pursues the goal of collecting a sample from asteroid Bennu and return it to Earth for analysis. To achieve this ambitious mission objective, two critical components are needed: a mechanism to collect and handle a regolith sample of up to two Kilograms from the asteroid surface, and a capsule to safely deliver the material to Earth for analysis at ground-based laboratories.
The collection of the material sample is accomplished by TAGSAM – Touch-And-Go-Sample Acquisition Mechanism which is also responsible for handing the sample off to the Sample Return Capsule which is described in detail on its dedicated page.
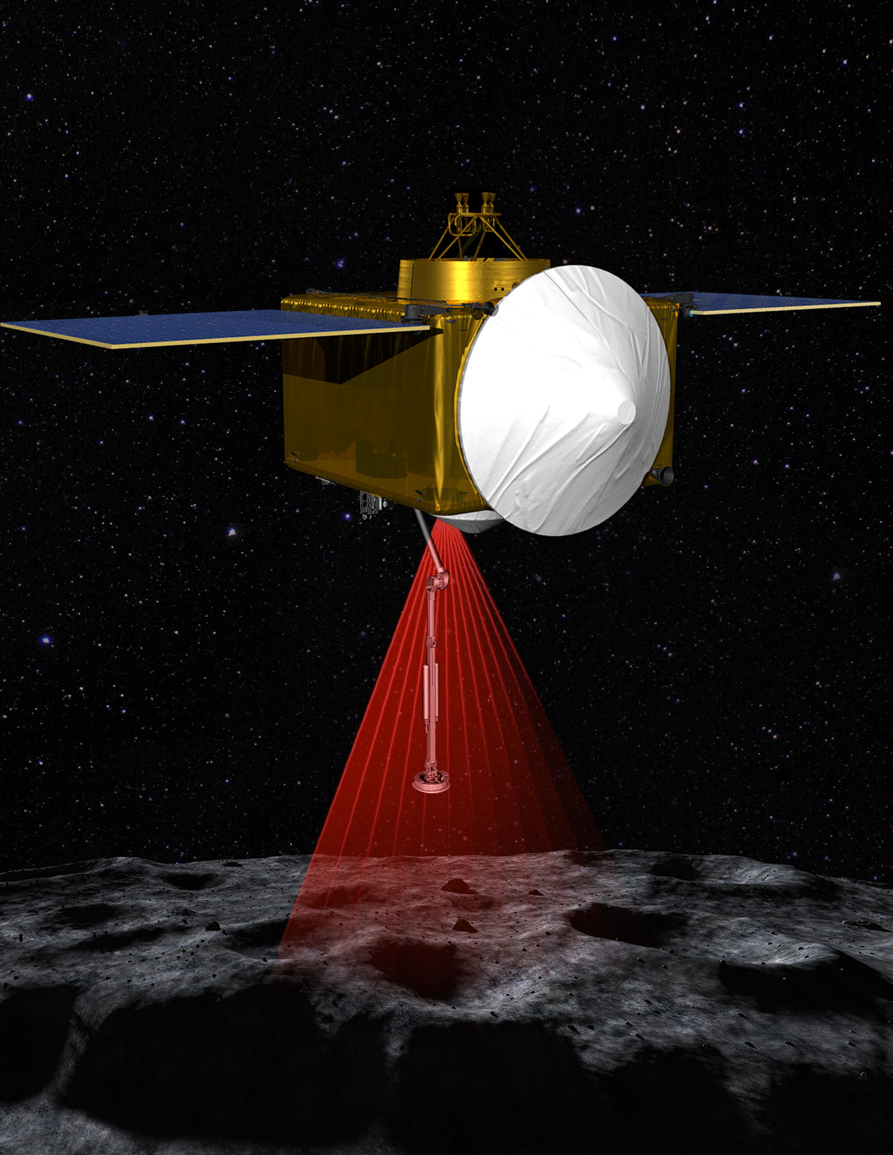
TAGSAM is comprised of a detachable sampler head installed on an articulated arm. Only the sampler head is expected to make contact with the asteroid’s surface employing an onboard source of high-pressure nitrogen to kick up regolith material to be captured within the sampler head plus fine-grained material collected via contact pads. Up to three sample collection maneuvers are possible to ensure sufficient sample mass enters the mechanism.

In a nutshell, TAGSAM is extended from the nadir-facing side of the spacecraft which then departs orbit and approaches the surface at a speed of 0.1 meters per second, touching down within 25 meters of a selected sampling point at a site deemed safe for the operation. Upon contact, springs are compressed and a direct nitrogen jet fires to fluidize regolith to allow the sample head to capture granular material while contact pads captures fine material.
After a five-second contact, the springs push the spacecraft away and a dedicated camera delivers images of the sample within the head. When sufficient material has been confirmed to be in the mechanism, the sampler head is placed in the Sample Return Capsule which is then closed for the return journey to Earth.
The robotic arm is has a total length of two meters and features redundant electromechanical actuators on the shoulder, elbow and wrist. It can extend the sample head to a position two meters directly beneath the spacecraft structure and maneuver to a viewing position to examine the collected sample using a camera and then stow the entire sample head for return to Earth.
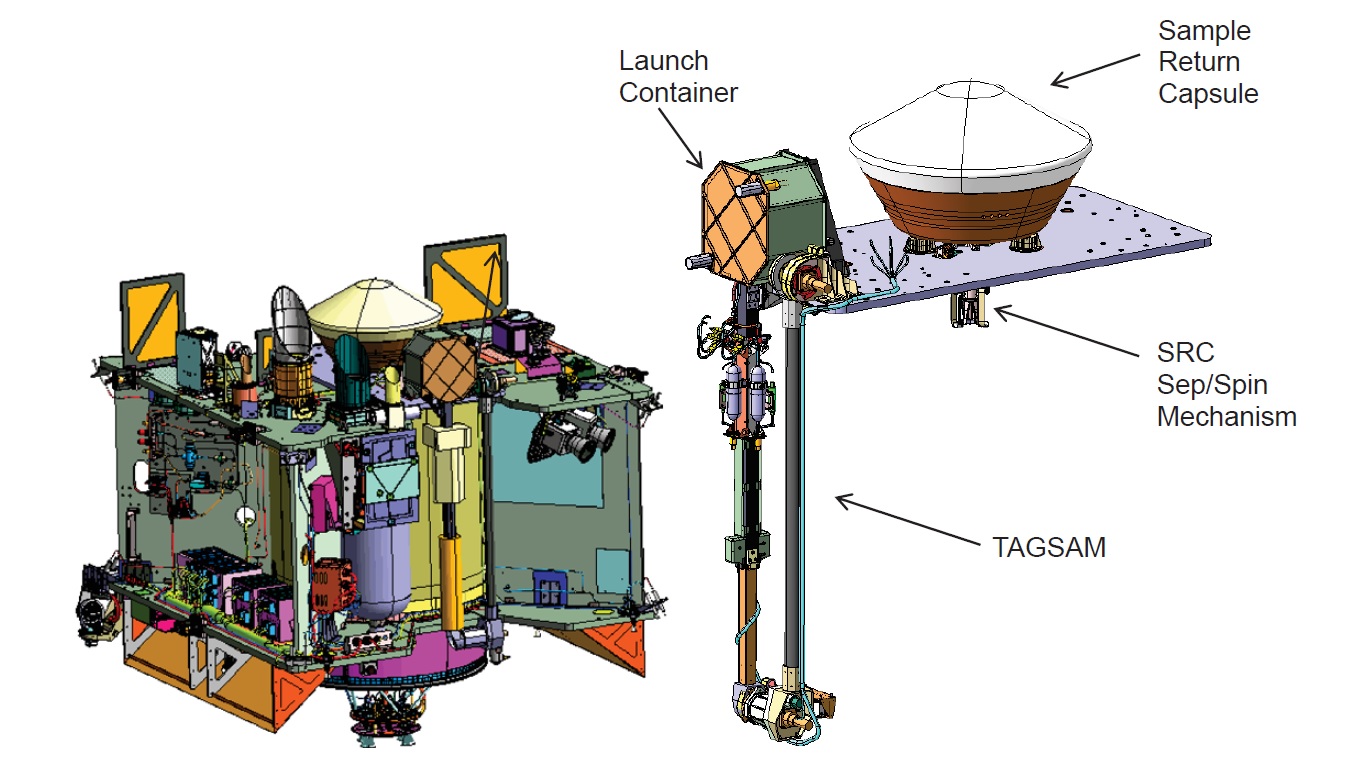

The Sample Head has a circular footprint and is stowed in a container during the launch with the drive mechanisms locked in place. The lower arm segment contains the Nitrogen storage bottles and a shock-absorbing spring with the Sample Head hinged to the wrist to allow for up to 15 degrees of tilt during the touch and go.
Should the misalignment be greater than 15°, the sampler will not be flat on the surface and sample acquisition may be unsuccessful.
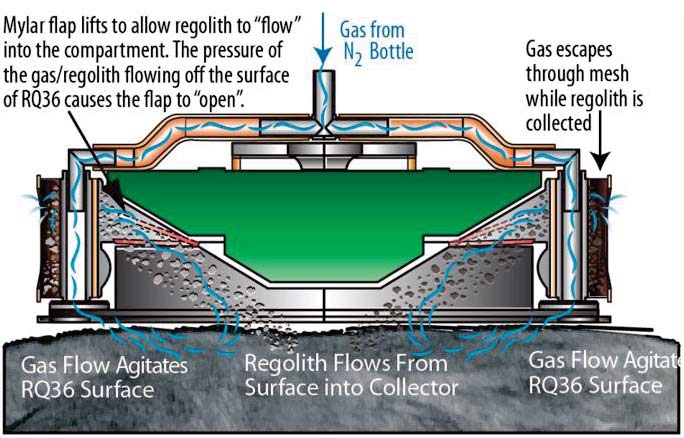
The principle behind the sampling device is to deliver high-pressure Nitrogen to the outer circumference of the sample head and flowing it toward the center, in the process disturbing the surface and fluidizing the regolith and any particles up to two centimeters in diameter.
The gas pressure will open mylar flaps and carry the material into the sample where it is captured in a mesh which allows the gas to escape, but retains all but the finest particles. When the gas flow ceases, the mylar flaps automatically return to a closed position and sample material is held in place.

The sample head is capable of collecting 150 to 2000 grams of material. Contact is detected by a combination of Inertial Measurement Unit data sensing the deceleration at surface contact and microswitches on the sample head, triggering the start of a five-second timer before the departure is initiated with springs. Thruster action during final descent is to be avoided in order to prevent residual Hydrazine from contaminating the sampling site.
Contact pads with a total active area of 26 square centimeters pick up fine dust particles up to one millimeter in diameter to collect a sample complementing the coarse material retained inside the sample head.
The Touch-and-Go Sampling Sequence is relatively complex to achieve the primary goals of protecting the spacecraft’s health and collecting a sufficient mass of sample material. Mission designers opted for the Touch and Go (TAG) instead of a landing on the asteroid to reduce the complexity of the maneuver.
After the selection of the most favorable and scientifically promising sampling site based on remote-sensing data, OSIRIS-REx initiates the final setup for its descent to the asteroid surface nine days prior to TAG.
At T-9 days, OSIRIS-REx completes the final reaction wheel desaturation prior to TAG – unloading momentum from the four reaction wheels by spinning them down and countering the induced torque by firing its attitude control thrusters. The firing of thrusters will slightly alter the craft’s orbit around Bennu and navigation specialists then need up to five days to complete precise orbit-tracking to work out the maneuvers needed for TAG.
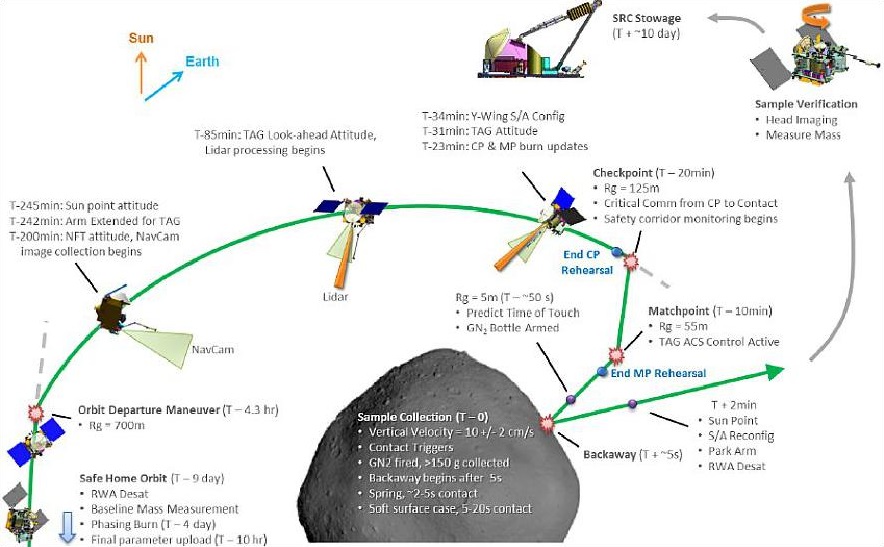
Next is the Baseline Mass Measurement, that rotates the spacecraft with the robotic arm in two different configurations to calculate the spacecraft moment of inertia. A similar measurement after TAG will provide a first confirmation of the sample mass to within a few dozen grams.

Between T-4 and T-1 days, OSIRIS-REx will use its low-thrust engines for a phasing maneuver with a change in velocity of under 1 millimeter per second to set up its TAG pass, aiming for the precise location of the selected landing site to be in a good spot when leaving orbit.
The upload of the TAG command logic occurs as late at T-10 hours, including all instructions needed for the TAG maneuver based on the latest tracking data. The Orbit Departure Maneuver at T-4.3 hours places the spacecraft on a close trajectory to within 125 meters to the surface. By T-4 hours and 5 minutes, OSIRIS-REx returns to its sun-pointed attitude to continue battery charging and downlink status data to Earth where Mission Controllers will be in a purely monitoring role for the maneuver.

The TAGSAM arm is extended to its sampling configuration at T-4 hours and 2 minutes with the arm’s potentiometer sensors in use to verify the full extension.
At T-3 hours and 20 minutes, OSIRIS-REx slews to an orientation favorable for imaging with NavCam, one of three cameras part of the TAGCAMS suite. The approach images created by NavCam will help in the reconstruction of the TAG maneuver and support optical navigation using a Natural Feature Tracking algorithm that processes NavCam imagery to be available as a backup navigation data source and check the operation of the LIDARs.
The LIDAR begins operation at T-85 minutes, bouncing laser beams off the asteroid to provide very accurate range and range rate data. At T-34 minutes, the two solar arrays will be canted up into a Y-Wing configuration that has been chosen to prevent dust from settling on the panels and to increase the ground clearance in case the spacecraft tips over upon contact. The TAG attitude – with the arm normal to the asteroid surface – is acquired by T-31 minutes and the spacecraft controller updates the burn parameters for the Checkpoint and Matchpoint maneuvers at T-23 minutes.
The Checkpoint is defined at a position 125 meters from the TAG site at which point the spacecraft executes a precise burn with its ultra-low thrust engines that transitions OSIRIS-REx from a passive flyby trajectory to an intercept path. Upon completion of the Checkpoint burn, OSIRIS-REx switches to critical communications and begins safety corridor monitoring, tracking the range and range rate to ensure the craft stays within a narrow corridor.
In case of any parameter drifting out of a safe envelope, OSIRIS-REx will autonomously command an abort, fire its thrusters at a delta-v of around 0.7m/s and depart the asteroid to a safe standoff to await instructions from the ground.
Prior to the TAG operation, the mission goes through a pair of rehearsals – each lasting around three weeks, the first to a point after the Checkpoint and the second to a position after the Matchpoint, essentially completing dry runs of the entire TAG process without actually making contact.
The Matchpoint, at T-10 minutes and a distance of 55 meters, marks the final ultra-precise burn that sets up the final approach at a speed of 0.1 meters per second with an error of less than 2 centimeters per second.
When the LIDAR senses a range of five meters – about 50 seconds prior to TAG – OSIRIS-REx switches to Low-Torque Reaction Wheel Control with its thrusters disabled unless high body rates occur for some reason at or after contact. The sampling event trigger is armed at this time, the Nitrogen pyrovalve safety is removed and the precise time of touchdown is calculated and input into the backaway countdown timer.

If surface contact is not sensed before the timer expires, OSIRIS-REx executes an abort maneuver. Contact triggers are the deceleration sensed by the Inertial Measurement Unit at touchdown as well as compression microswitches in the TAGSAM arm which sense compression. Either of these triggers is sufficient to fire the Nitrogen pyrovalve.
While the sample head is flat on the surface a spring in the TAGSAM arm absorbs momentum by compressing. The touchdown detection triggers the start of a five-second timer which initiates the backaway maneuver.
For the backaway, all ACS thrusters are re-enabled and immediately dampen body rates and ensure all attitude errors occurring during contact are removed before inducing a delta-v of 0.7 meters per second – sufficient to escape the asteroid’s gravity. Depending on the surface properties, TAGSAM may be in contact for only two seconds in case of a hard surface which will lead to the spring reaching maximum compression and pushing the vehicle off again. In case of a very soft surface, contact may last 20 seconds.
The attitude sensors continuously monitor the spacecraft’s orientation relative to the surface with all thrusters disabled until either the timer expires or a tilt of 45 degrees is sensed at which point an immediate backaway is performed.

At T+2 minutes, when the spacecraft is well clear of the surface, the slew back to a sun-pointed orientation will begin and the robotic arm will be parked ahead of a switch in flight dynamics software to permit reaction wheel desats when needed.
There are only very small margins in the TAG maneuver as OSIRIS-REx is required to touch down within 25 meters of the precise sampling site coordinates with a velocity error of under 2cm/s for both vertical and horizontal speed to satisfy the tip-over requirements.
Having completed the actual TAG, OSIRIS-REx enters an equally important phase to verify that sufficient sample was collected. Mass measurement slews are repeated in the days after the maneuver to determine the change in the inertial properties of the spacecraft – taking into account propellant expended during TAG. This will yield a basic mass estimate of the collected sample with an accuracy better than 49 grams.
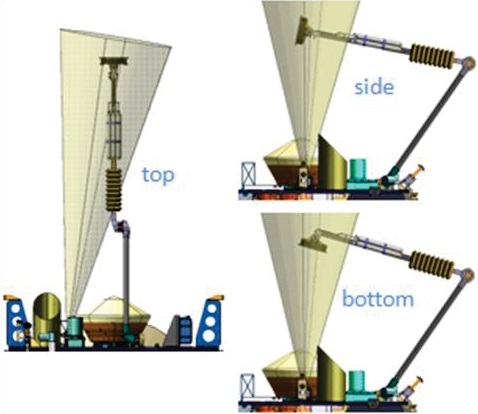
SamCam delivers images of the sample head from three different view points, first looking down at the top of the sample head followed by a side profile and then a view at the bottom of the structure. This will a) provide visual confirmation that sample material has been captured and b) verify the surfaces of the sample head are clean and there is no obstruction that could hinder the installation of the sample head in the Sample Return Capsule.
Contingency procedures in case of a visible obstruction are available and have been verified as part of mission design work.
The sampling attempt is set for July 2020 with eight months of margin before the scheduled departure of Bennu in March 2021 – thus providing plenty of time for the TAG rehearsal and possible repetition as well as up to three sample collection attempts with surface contact should anything go wrong during the initial attempts.
The OSIRIS-REx mission team will consult with NASA HQ to obtain permission to stow the sample after verifying that all involved parties are happy with the amount of sample material in the device.
For the stowage of the sample head, the Sample Return Capsule will be opened up and the robotic arm will carefully maneuver the sample head into a receptacle that includes three secure attachment locks.
Microswitches and imagery acquired by StowCam confirm a good lock on the sample head before the arm is detached from the sample and the capsule is sealed.
This marks the end of TAGSAM’s operation, leaving the return journey up to the OSIRIS-REx spacecraft and its navigators before relying on the Sample Return Capsule.
