

Cygnus Cargo Craft arrives at Space Station delivering new Science & Easter Eggs

The Cygnus OA-6 cargo craft arrived at the International Space Station on Saturday following a three-day flight from its liftoff at Florida’s Space Coast to the orbiting outpost, culminating in the successful robotic capture of the spacecraft. Cygnus OA-6, named S.S. Rick Husband in honor of Shuttle Columbia’s last commander, is set for berthing to the Unity Module of ISS and booked for a stay of around two months to facilitate the delivery 3,395 Kilograms of cargo.
Saturday’s rendezvous was by the book – starting with the spacecraft approaching its destination from behind and below, catching up to a point directly below ISS from where the final phase of the rendezvous was initiated to allow Cygnus to make a slow climb straight up to its capture position, within reach of Canadarm2, flown by NASA Astronaut Tim Kopra. Cygnus capture was confirmed at 10:51 UTC and procedures went into motion as part of a multi-hour sequence to berth the craft to the Unity node.
Cygnus is carrying a multitude of items to the International Space Station including 1,139 Kilograms of crew supplies, the majority being food provisions for the six crew members in orbit, 1,108kg of systems hardware and maintenance equipment to keep ISS in ship shape, 255kg of EVA Equipment and Computer Hardware, and 777 Kilograms of science hardware – supporting several dozen investigations in progress aboard the orbiting laboratory.

Cygnus began its high-speed pursuit of the Space Station on Wednesday at 3:05 UTC when lifting off atop an Atlas V rocket, coming on the heels of the OA-4 mission that ended just over a month before Tuesday night’s liftoff.
The OA-6 spacecraft was delivered to an on-target orbit, though its launch was not without trouble – the Atlas V first stage suffered a significant performance hit, shutting down over five seconds early, requiring the Centaur upper stage to save the day and use up almost its entire fuel margin to extend its engine burn and make up for lost performance.
Reaching its target orbit, Cygnus did not suffer any consequences of the glitch occurring during ascent with the exception of being separated one minute later than planned, around 500 Kilometers further downrange. This did not pose a serious issue, but required the team at Mission Control in Dulles to re-calculate orbital maneuvers based on the actual separation conditions.
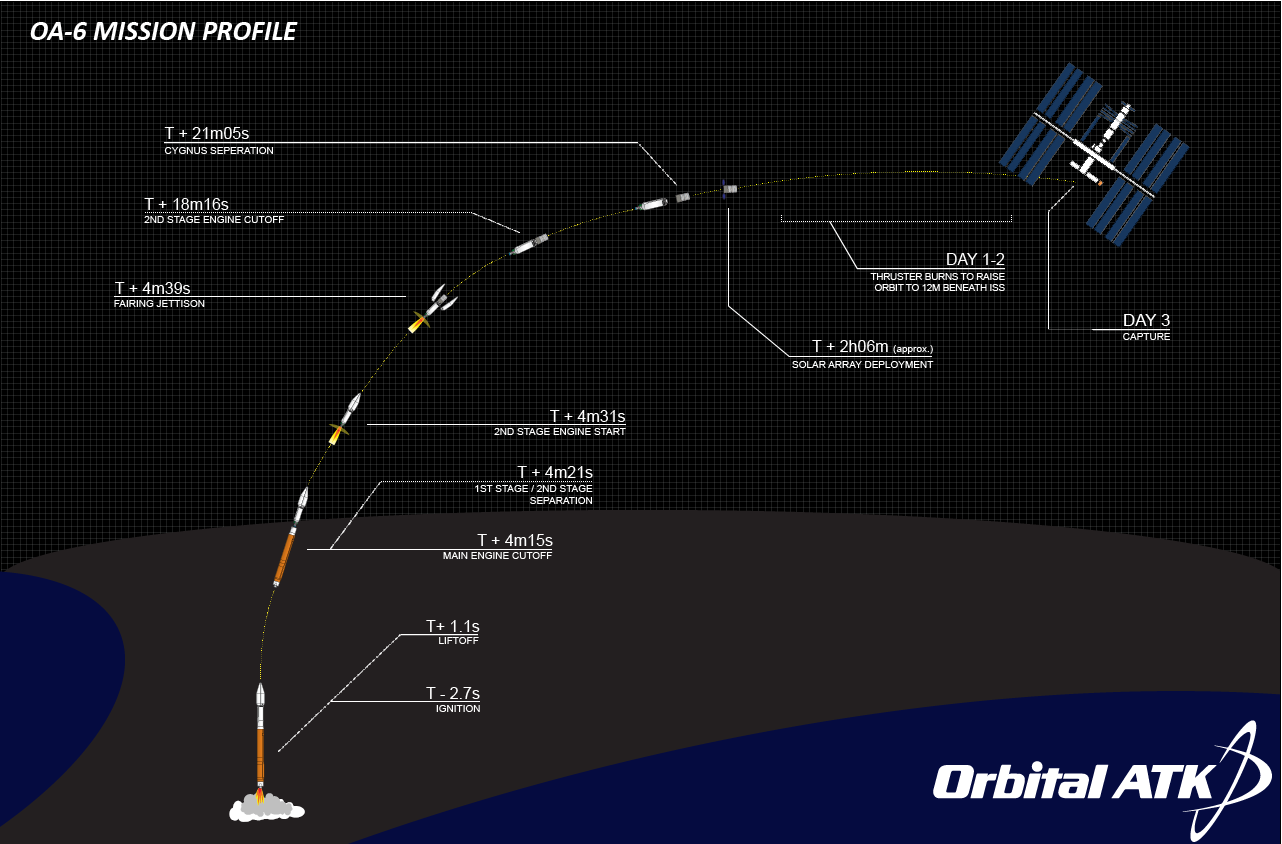

Arriving in orbit after an eventful launch, Cygnus successfully unfurled its two circular solar arrays and checked all systems to be ready for its flight to ISS. With no issues on the spacecraft, Cygnus executed its first major DV burn at around 10 UTC on Wednesday, a ten-minute firing of the craft’s main engine to begin the process of climbing up from the 230-Kilometer insertion orbit to ISS in its orbit just over 400 Kilometers in altitude.
Another DV burn followed on Wednesday and the next burn pair was conducted on Friday to set up for rendezvous initiation at 5:30 UTC on Saturday. Three and a half hours prior to its arrival, Cygnus passed the Joint Targeting Reference Point marking the start of joint operations between MCC Dulles and ISS Mission Control in Houston. Cygnus began relative navigation with ISS, constantly passing GPS readings between the two spacecraft and establishing communications via the Hardware Command Panel set up inside the Robotics Workstation.
The Station’s two Tims, Tim Kopra of NASA and ESA’s Tim Peake, were in charge of bringing Cygnus in for the capture. They manned their stations inside the Cupola when Cygnus was at 1,000 meters to begin monitoring the approach. Having done its Approach Initiation burn, Cygnus intercepted the R-Bar at 350 meters to ISS, set for an approach from straight below ISS.
Switching to its laser-guided proximity navigation system, Cygnus climbed up the R-Bar, an imaginary line connecting ISS and the Center of the Earth. The spacecraft completed two scheduled holds at 250 and 30 meters to allow controllers in Dulles to check the status of the spacecraft and complete necessary reconfigurations leading up to capture.


Cygnus remained on target throughout its climb, making its arrival at the Capture Point at 10:35 UTC, zero-ing out any relative rates and coming to a perfect stop within reach of the Station’s robotic arm.
A final check by Mission Control revealed all was in readiness for Capture and the two Tims were given their final GO for Capture, which is the last call from the ground, allowing the crew to work through the setup steps and the capture at their own pace. ISS was placed in a Fine Attitude Hold mode and Cygnus headed into Free Drift shortly before capture to avoid any inadvertent thruster burns during capture.
Tim Kopra, flying the arm, released the brakes and maneuvered the SSRMS Latching End Effector to be aligned with Cygnus’ Power & Video Grapple Fixture using the Translational Hand Controller inside the Cupola to move the arm in the +X direction. After some corrections along the way, the LEE was placed over the pin and snares were commanded to close in order to obtain a firm grip of Cygnus.
Cygnus capture was called at 10:51 UTC when the robotic arm had a firm grip on the 7,500-Kilogram spacecraft, marking the completion of a flawless rendezvous. Congratulations were exchanged between Mission Control and the team in orbit before the two Tims worked through reconfigurations of the Robotics Workstation to hand ROBO duties off to the team on the ground for the long berthing operation.


Cygnus is put through a series of reconfigurations and ISS is planned to maneuver back to its nominal attitude while the arm takes Cygnus through a range of motions, reaching a standoff position at the Unity Node. The Earth-facing port of Unity was freed up in 2015 when the Permanent Multipurpose Module was moved from Node 1 to Node 3, giving ISS two operational berthing ports for visiting vehicles on the U.S. Segment. The previous Cygnus craft was the first visiting vehicle to use the Node 1 berth.
Controllers will precisely guide Cygnus to its pre-berth position, taking some additional time to verify the spacecraft is positioned with millimeter-accuracy before four capture latches are closed and the robotic arm goes to a limp mode for the second stage capture. 16 bolts will be commanded in four sets of four to firmly pull Cygnus in and form a pressure tight seal between ISS and the Common Berthing Mechanism of the spacecraft.
Later on Saturday, the ISS crew will go through leak checks on the interface between the spacecraft ahead of the opening of the Node 1 hatch to be followed by the removal of electronics assemblies and the installation of power and data jumpers. Hatch opening on Cygnus is planned on Sunday to open the spacecraft for business as part of a docked mission currently expected to last until May 20.
Cygnus OA-6 is the first of three missions carrying SAFFIRE Spacecraft Fire Experiment payloads, the first experiment to study large-scale fires to better understand flame growth dynamics and oxygen consumption in the microgravity environment.

To date, only small scale combustion experiments were possible in space and spacecraft manufacturers have relied on models valid in gravity conditions when designing fire safety systems for use in space. SAFFIRE will light a large piece of fabric on fire in an experiment enclosure after Cygnus has left ISS and document the burning process with cameras and other sensors.
Science equipment to be delivered to ISS includes an experiment looking at how asteroid and comet surface material behaves in microgravity to better understand possible problems when attempting to anchor a spacecraft on such a regolith surface.
Another payload flying on Cygnus is Meteor, a camera system designed to capture the spectral signatures of meteors burning up in Earth’s atmosphere to reveal the composition of their parent bodies formed billions of years ago, thus peering deep into the past of the universe. This is the third attempt to fly Meteor to ISS after units were lost in the 2014 Antares launch failure and 2015 Falcon 9 mishap.
Cygnus is also delivering a new 3D printer to ISS so that tools and components can be manufactured right there aboard ISS, further testing the ‘machine shop in space’ that is the ultimate goal to achieve when launching on a deep space mission to be able to manufacture tools and systems parts as needed. Other technical demonstrations flying on Cygnus include a gripping device using gecko technology, a new type of heat pipe for future use in spacecraft, and a miniature exercise device to be tested on ISS for future application in spacecraft where space is limited.
