
PeruSat-1

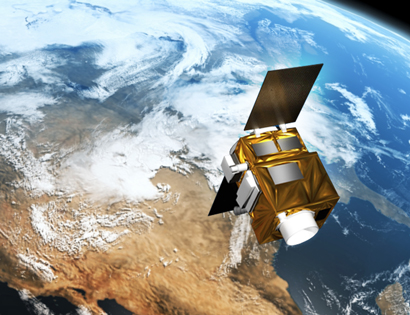
PeruSat-1 is a high-resolution multi-spectral Earth Imaging satellite built by Airbus Defence and Space for operation by the Peruvian armed forces and other government entities.
The PeruSat-1 satellite was ordered by the government of Peru in April 2014 for an exceptionally fast development and production for liftoff just over two years after the contract was signed. It is the first Peruvian Earth Observation Satellite and its operation will be handled by the Peruvian Space Agency CONIDA.
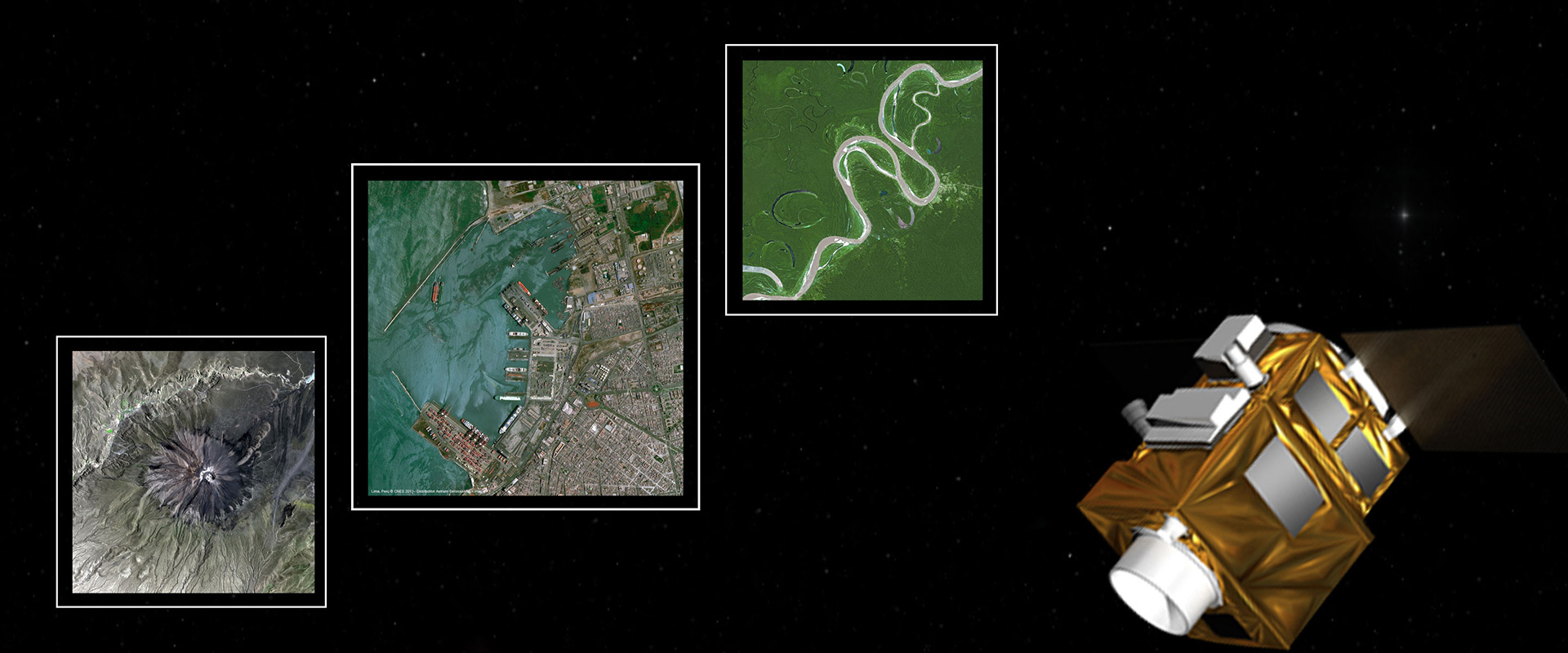
According to the Peruvian government, data products from the satellite will find a wide range of applications including agriculture, urban planning, border control, humanitarian aid, disaster monitoring and the fight against drug trafficking.
PeruSat-1 is based on Airbus Defence and Space’s AstroBus-300 satellite platform, also known as AstroBus-S representing a smaller and simplified version of the larger AstroBus-500 bus that has been used by different space agencies for Earth observation projects. The payload, a variation of the modular NAOMI imaging system, has also flown on previous satellites, allowing Airbus to use existing processes and hardware.
Airbus Defence and Space was able to realize the PeruSat-1 spacecraft in less than 24 months. The platform construction phase and technical and operational verification took only five months each and the Assembly Integration and Testing (AIT) of the instrument payload was completed in only eight months. This was largely possible through a new integrated work organization at Airbus that brings down the development and construction lead times for satellites up to 500 Kilograms.
PeruSat-1 has a launch mass of 430 Kilograms and measures 1.0 by 1.0 by 1.7 meters in size. Its operational mission is projected to last at least ten years from a Sun Synchronous Orbit 695 Kilometers in altitude optimized for proper operation of the imaging instrument.

The AstroBus-S satellite platform part of a whole family of satellite buses covering a Low Earth Orbit mission range from 125 to 4,000 Kilograms. The AstroBus satellites are built to share a number of common avionics components to streamline the production line and reduce overall cost. The compact AstroBus-S is the extension of the AstroBus line to the lower size range with evolutions through Airbus developments as well as the Myriade platform originally developed by the French Space Agency CNES for very lightweight satellite missions.
AstroBus-S can reuse a number of components from the AS250 avionics package developed by Airbus and is complemented by Myriade evolutions. AS250 components incorporated by AstroBus-S are the onboard computer, Remote Interface Unit, Star Tracker, antennas, Magnetotorquers and Magnetometers. Myriade systems feeding into the development of AstroBus-S include the structural concept, propulsion module, power system, reaction wheels and downlink chain.
The box-shaped PeruSat-1 spacecraft hosts a pair of deployable solar arrays that generate power fed to the satellite via a Direct Energy Transfer scheme. A Power Conditioning and Distribution Unit handles the switching and protection of the power buses using a combination of Latch-up current limiters and Fault Current Limiters that allow critical satellite systems to remain powered in case of an anomaly.
The power bus is not regulated and its voltage fluctuates between 22 to 34V depending on the state of charge of the batteries. Stability of secondary power supplies is ensured by the power supply units of each subsystem.
The AS250 avionics provide a complete attitude determination and control architecture. Attitude control is provided by reaction wheels and three magnetic torquers are used for coarse control and for momentum dumps of the reaction wheels. Three-axis attitude and orbit measurement is accomplished through a Star Tracker Assembly with two optical heads and a GPS unit.

The Hydra Star Trackers can provide attitude tracking in two heads simultaneously, acquiring the satellite’s three-axis orientation within 2.5 seconds from a lost in space scenario at body rates up to 8deg/s.
An inertial measurement unit is used to improve three-axis rate measurements and serves as backup to the star trackers. The dual-frequency GPS receiver can be used for orbit determination with an accuracy of 3 meters. In spacecraft safe mode, attitude determination is provided by a Magnetometer and Coarse Sun Sensor that are used to keep the satellite in a safe Earth- or Sun-pointed attitude.
The baseline AstroBus-S features a Propulsion Module employing a spherical tank holding up to 28 Kilograms of Hydrazine Propellant fed to four thrusters used for orbital maneuvers. The 1N thrusters can tolerate supply pressures of 5.5 to 23 bars to generate a thrust of 0.36 to 1.45 Newtons. The corresponding specific impulses are 205 seconds at the lowest supply pressure and 221 seconds at the highest pressure. Each thruster assembly weighs about 0.23 Kilograms and can be operated in steady-state mode and pulse mode for attitude control.

Payload data is downlinked via a two-channel cold redundant X-Band system that achieves data rates between 180 and 310 Mbit/s using QPSK modulation. Telemetry downlink and command uplink is accomplished using an S-Band system with omni-directional coverage at 625kbit/s for downlink and up to 64kbit/s for command uplink.
Command & data handling, spacecraft control and communication is provided by a control system built around the SCOC3 Spacecraft Controller On-a-Chip that uses a LEON-3 microprocessor. The redundant onboard computer provides processing, reconfiguration and timing functions, data input/output and customization capabilities. A Remote Interface Unit allows the spacecraft computer to be reconfigured in flight.
1553 data buses are used to handle spacecraft platform data and data acquired by the payload. The flight software used by the spacecraft is based on the RTEMS operating system with customizable software elements tailored for specific mission purposes. The flight computer uses an autonomous Failure Detection, Isolation and Recovery system.
The main payload of the PeruSat-1 satellite is NAOMI, the New AstroBus Optical Modular Instrument, flying in its larger version with a 65-centimeter aperture and employing an all-Silicon-Carbide (SiC) Design to achieve the highest possible optical performance. NAOMI has a mass of 150 Kilograms including the telescope and focal plane plus video electronics units.
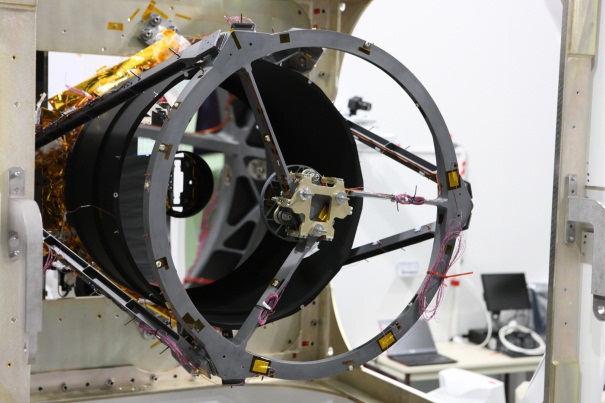
The instrument is a high-resolution pushbroom-type imager that was developed by EADS Astrium and SAS. NAOMI is comprised of an optical bench consisting of Sintered SiC to provide extremely high thermal stability, a focal plane assembly with Time Delay Integration Detector, back-end electronics for data processing and interfaces for data and command exchange with the spacecraft computer.
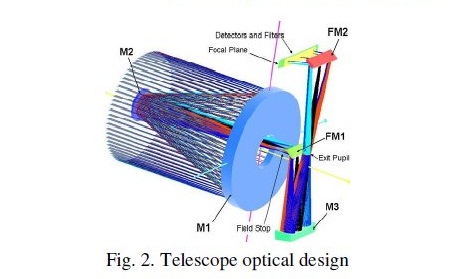
The telescope uses a Korsch combination with three aspheric mirrors and two folding mirrors using an aperture diameter of 65 centimeters. This design was chosen because of its simplicity and compact size – fitting within the small spacecraft platform. An entrance baffle is used for stray light rejection. Light entering the detector is passed from the primary mirror M1 onto the M2 mirror before passing Folding Mirror 1 to the M3 mirror that reflects the light through the Exit Pupil to Folding Mirror 2 that passes the light onto the detector.
The Time Delay Integration detector uses a silicon CCD detector assembly with four lines for blue, green, red and near infrared imaging at a ground resolution of two meters. A larger detector element employed for panchromatic imaging (450-750nm) generates imagery at a resolution of 0.7 meters. NAOMI covers a ground swath of over 20 Kilometers.
All detectors are equipped with strip filters and front end electronics. The front end electronics provide the detectors with biasing and clocking signals as well as pre-amplification of the signals before transmitting them to the video electronics.
The back-end electronics provide power supplies for the operation of the front-end and provide data processing via modular video chains that operate at frequencies of up to 15Msamples/sec. The signals from the front end is digitally converted in the back end using a 12-bit conversion scheme and the data is then transferred for real-time processing and storage in the mass memory.