

U.S.-Japanese Spacewalking Duo Aces Final ISS Robotics Rejuvenation EVA + Get-Ahead Tasks
A veteran NASA spacewalker and an EVA rookie from Japan ended their week with nearly six hours of work outside the International Space Station on Friday to finish the restoration of the Station’s Mobile Servicing System that started last year and continued in January to provide Canadarm2 with a new pair of grappling hands. The task at hand for NASA’s Mark Vande Hei and JAXA’s Norishige Kanai on Friday was reshuffling the removed Latching End Effectors to return a temporary payload holding mechanism to service and take the grapple fixture in worse condition back inside ISS for eventual return to Earth.
Friday’s excursion lasted five hours and 57 minutes and saw Vande Hei and Kanai complete the primary objective of swapping Latching End Effectors on the Station’s Payload/ORU Accommodations and taking the non-functional unit back inside ISS to be returned to Earth for inspections and refurbishment. Additionally, after racing through their primary task, the pair also aced a list of get-ahead tasks on the outside of the U.S. Segment that including lubricating one of the robotic arm’s newly installed end effectors.

Friday’s EVA was the 208th spacewalk in support of ISS Assembly, Maintenance and Upgrades; it was the third EVA of the year after a USOS EVA in January that changed out Canadarm2’s second hand and a Russian spacewalk earlier this month that upgraded the Russian Segment’s high-bandwidth communications system. For Mark Vande Hei, Friday’s EVA was his fourth career spacewalk for a total of 26 hours and 42 minutes; Norishige Kanai completed his first EVA on Friday, becoming only the fourth Japanese national to step into the void.
The focus of U.S. EVA-48 was on finishing work to fully restore the Space Station’s Mobile Servicing System after a five-EVA effort that aimed to leave Canadarm2 with two effectively brand new Latching End Effectors (LEEs) to guarantee the vital robotic asset can remain in operation for the remainder of the Space Station’s useful life.

Canadarm2 arrived on ISS in April 2000 and has since taken a number of roles within the Station’s operational repertoire – providing a helping hand during assembly of the ISS by moving large pressurized modules and assembling the Station’s 108.5-meter long Integrated Truss Structure. With ISS taking is operational shape, Canadarm2 began a second career grappling and releasing visiting HTV, Cygnus and Dragon spacecraft, having completed close to 30 such maneuvers over the last nine years.
The 1,800-Kilogram Canadarm2 – building on experience from the less-advanced Space Shuttle Robotic Arm – has seven motorized joints to move in seven degrees of freedom, similar to the human arm but with a much greater range of motion.
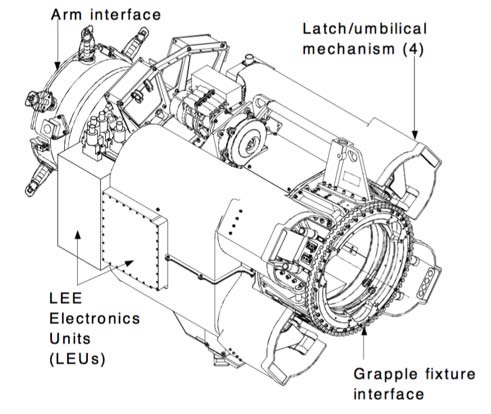
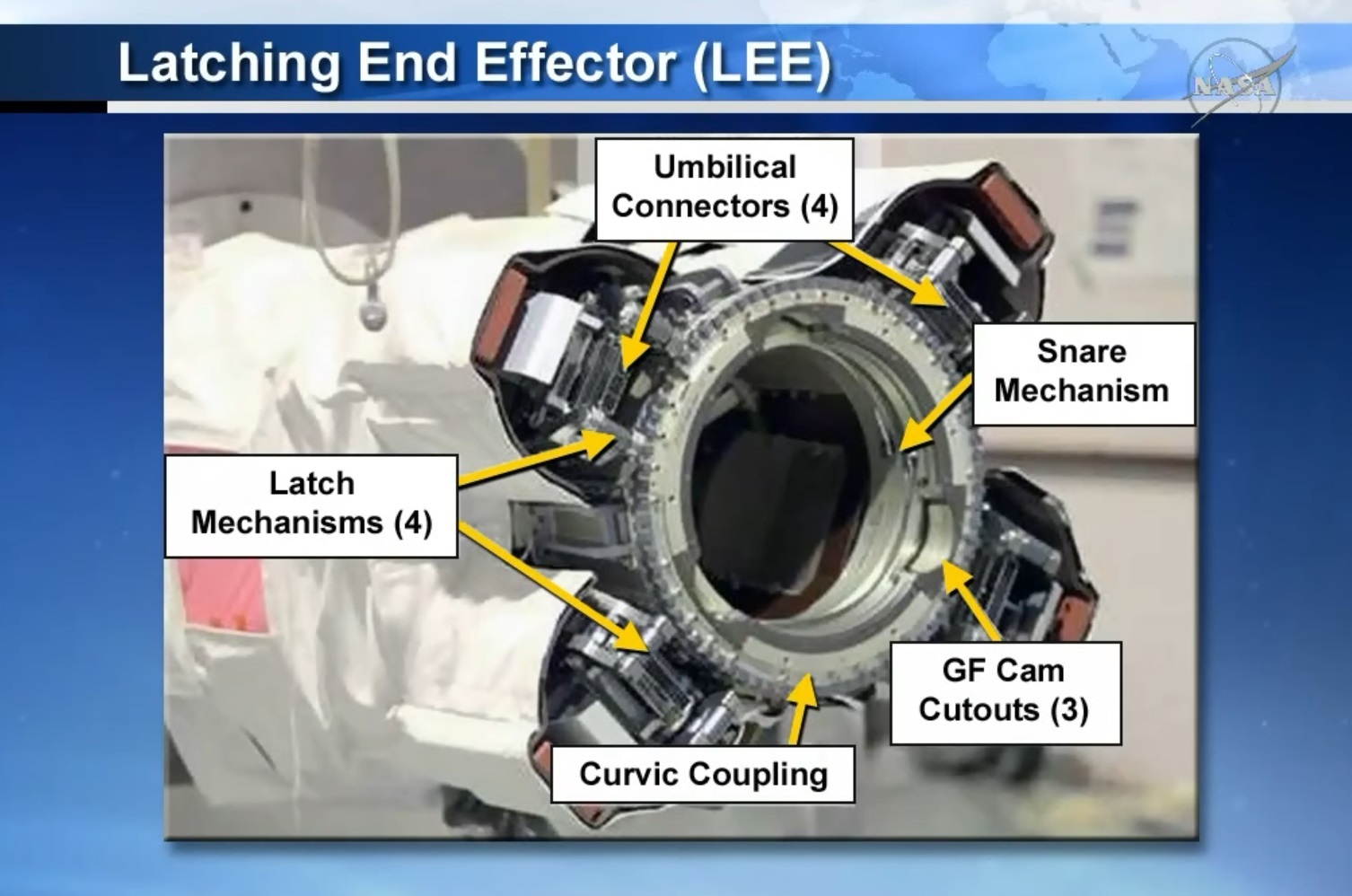
Either end of the arm is outfitted with a Latching End Effector (LEE) that can serve as the base point of the arm or as the free-flying end to manipulate items, also allowing the arm of self-relocate end-over-end between the different Power & Data Grapple Fixtures (PDGFs) on the outside of ISS.
Built for ten years of active service, the two LEEs began showing initial signs of wear & tear after around 12 years of regular operations. To prolong their lives, the moving parts of the LEEs were lubricated in 2015 but a replacement of the two units would eventually be inevitable to ensure Canadarm2 can continue supporting external operations.
The rejuvenation of Canadarm2 began in earnest last July when teams began putting together spacewalk procedures for the replacement of Latching End Effector B (LEE-B) that had been showing signs of worse wear & tear than its LEE-A counterpart on the other end of the 17.6-meter long robotic arm. However, these plans changed when LEE-A suffered a motor stall in its latches – leaving it without the ability of forming an electrical/data bridge.
Priority was therefore given to LEE-A (#202) and its replacement was completed in October by Randy Bresnik and Mark Vande Hei using the seldom-used POA LEE (#203) to become the new LEE-A after it only underwent 14 cycles over its 15-year tenure on ISS vs. over 400 cycles for each of the arm LEEs. After three EVAs in October, another pair of spacewalks was originally lined up for January 23 and 29 to accomplish the replacement of LEE-B (#201) with a flight spare (#204) and then shuffle the removed arm LEEs to have the one still in operational condition take a new role as the POA LEE while the non-operational #202 LEE (former LEE-A with the stalled latches) returns to Earth on an upcoming Dragon mission.
The January 23 EVA by Vande Hei and Scott Tingle successfully accomplished the replacement of LEE-B with the #204 spare that was delivered in 2009 on Express Logistics Carrier 1.

However, testing of the newly installed LEE showed it was only communicating on one of two data strings – an undesirable configuration since redundant command/data paths are required for arm operations. This sent teams on the ground into two different directions: robotics specialists with the Canadian Space Agency began developing software patches to gain additional insight into the nature of the communications problem on the primary string while EVA teams in Houston began re-planning the January 29 EVA to backtrack and put the old LEE-B back in place should troubleshooting not yield positive results.
Luckily, robotics specialists managed to confirm by January 28 that the problem could be fully solved through software patches. As a result, EVA-48 was pushed to provide additional time to fully activate the new LEE-B and confirm communications are good on all channels – allowing EVA-48 to revert to its original task list of shuffling the two former arm LEEs.

EVA-48 slipped from Thursday to Friday to make way for the inbound Progress MS-08 cargo ship that made a successful docking Thursday with 2.5 metric tons of supplies after encountering a launch delay earlier in the week. Getting ready for their day outside, Vande Hei and Kanai got up bright and early on Friday to put on their Extravehicular Mobility Units – EMU #3003 for Vande Hei, reprising his role as lead spacewalker, and EMU #3008 for first-time spacewalker Kanai.
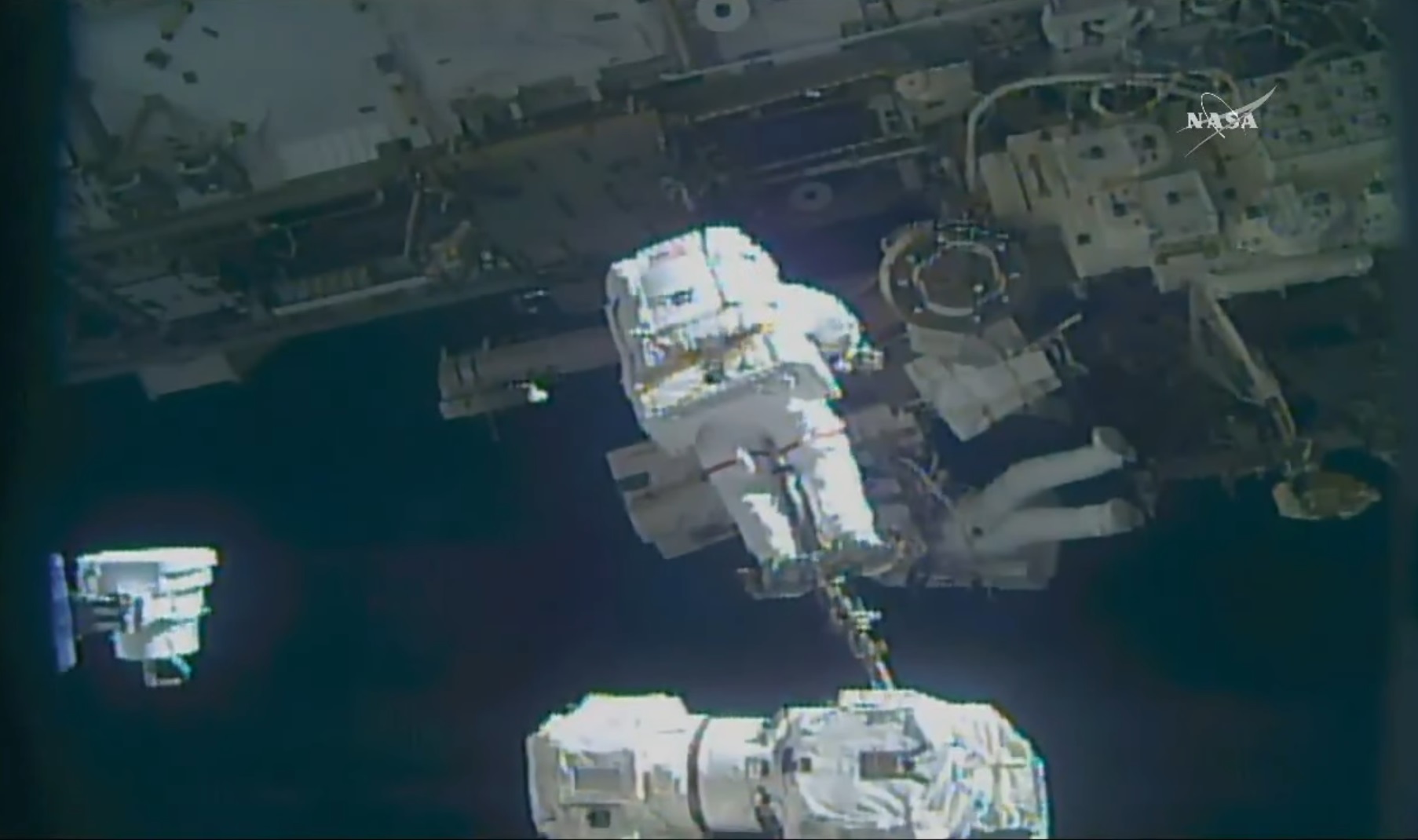
Assisted by Scott Tingle and Joe Acaba, the two spacewalkers went through a lengthy pre-breathe protocol before conducting final suit checks and entering depressurization of the Quest airlock. EVA-48 officially started at 12:00 UTC when the two spacewalkers switched their suits to battery power and climbed out of the external hatch to complete initial setup tasks of safety tethers before getting to work.
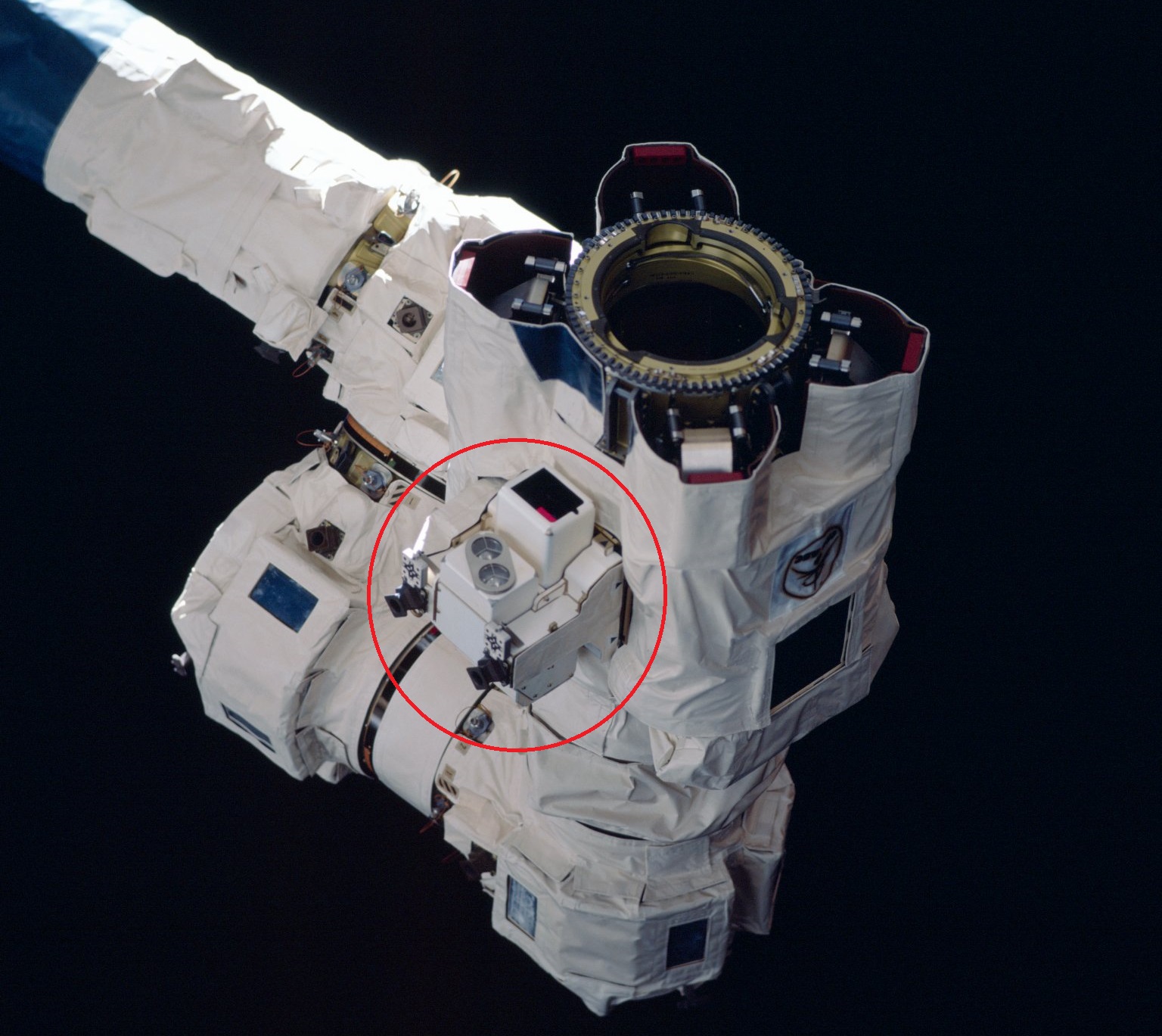
For Norishige Kanai, the EVA began with the translation to the Mobile Base System’s Payload/Orbital Replacement Unit Accommodations (POA) where the former LEE-A had been residing since October. Given the degraded latches on the LEE, the POA no-longer had the ability of passing power to whatever it was holding and therefore it was desired to replace the non-functional #202 LEE with the former LEE-B which had degraded but still functional latches expected to be able to support POA duties for the remainder of the Station’s life.
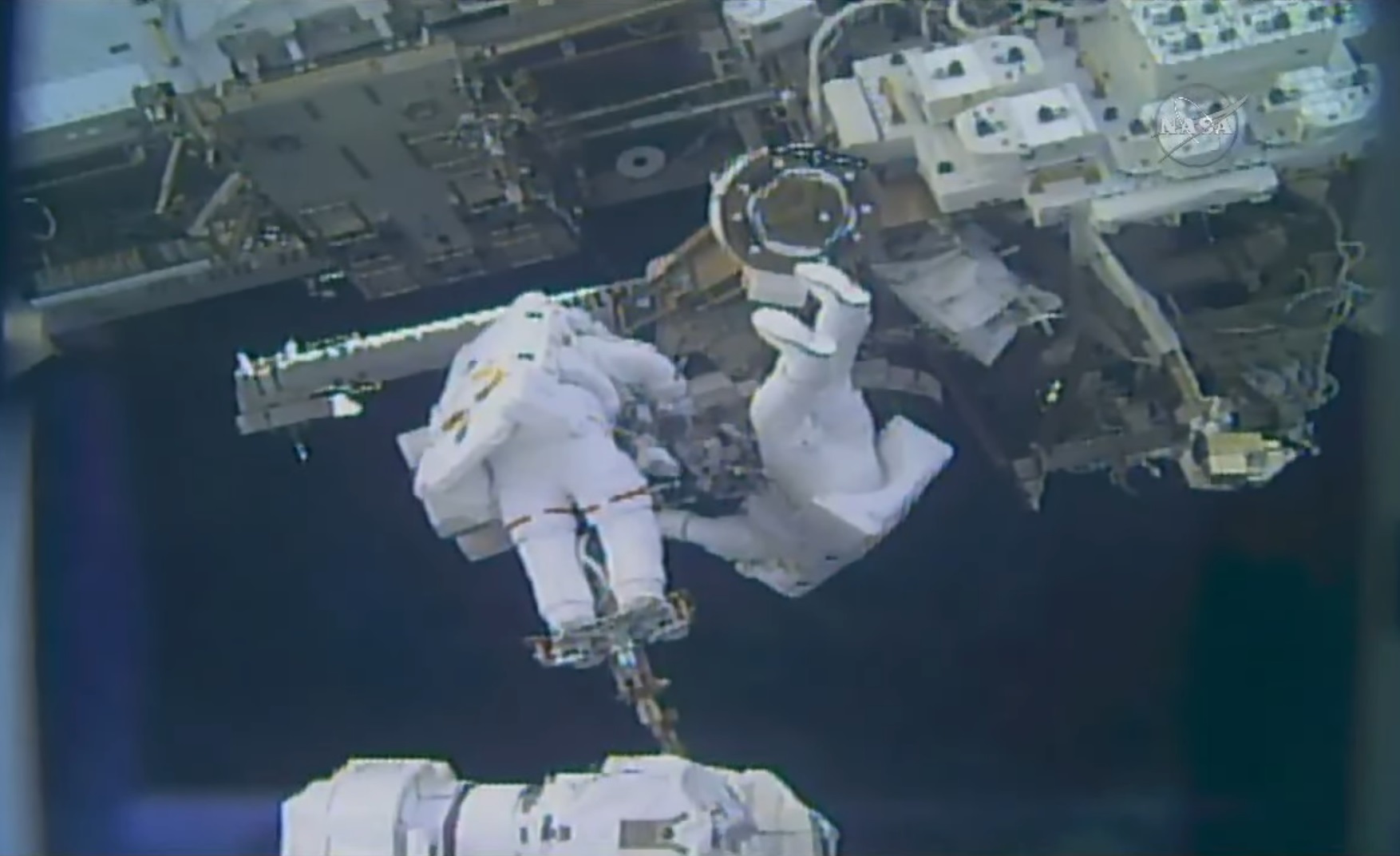
At the POA, Kanai removed the Camera & Light Assembly CLA from the LEE by releasing a pair of Micro-Fixtures and auto-mate connectors. Meanwhile, Vande Hei installed a foot restraint on Canadarm2 to go for a ride on the end of the arm to join Kanai at the POA where the two were then tasked with releasing the LEE – a two-step process requiring the crew to disengaging the LEE Mate/Demate Mechanism using their Pistol Grip Tools and then releasing six Expandable Diameter Fasteners (EDFs) that form the high-load interface between the LEE and the POA.

Because all these bolts had been exercised in October, the EV crew did not run into any stuck EDFs and the two made quick work releasing LEE #202. Mark Vande Hei had a firm hold of the LEE while robotic operators Acaba & Tingle maneuvered him over to the Quest Airlock where the LEE was handed to Kanai for temp-stowage in the airlock. Next for the two was the retrieval of the former LEE-B (#201) that had been stowed on a support ring on External Stowage Platform 2 on EVA-47.
Only four of six EDFs had to be released to retrieve the LEE and it was again up to Vande Hei to move it over to the Mobile Base System through help of the robotic operators. Back at the POA, the spacewalkers put the LEE into a soft-dock position and got started with the six EDFs which, as their name suggests, change in diameter when being driven by pushing out collets in order to form a friction fit with very high stiffness and zero tolerance.
To guarantee a high-load interface, the EDFs were driven to torque using the Pistol Grip Tool followed by one or more re-triggers at a higher torque setting to ensure no tolerance exists within the structure. With all six EDFs driven to torque, Vande Hei departed the worksite while Kanai dealt with re-engaging the LEE Mate/Demate Mechanism and attaching the CLA he had removed earlier to the new POA LEE – marking the completion of the EVA’s primary task just two hours and 50 minutes into the excursion, some 100 minutes ahead of the planned timeline.
Three hours and 21 minutes into the EVA, Mission Control Houston reported a good activation and initial checkout of the new POA LEE with further checks and characterization over the coming days. Its first use will likely come on the HTV-7 mission penciled in this summer when the POA will be called upon to hold the HTV Exposed Pallet delivering the next set of Li-Ion batteries to ISS.
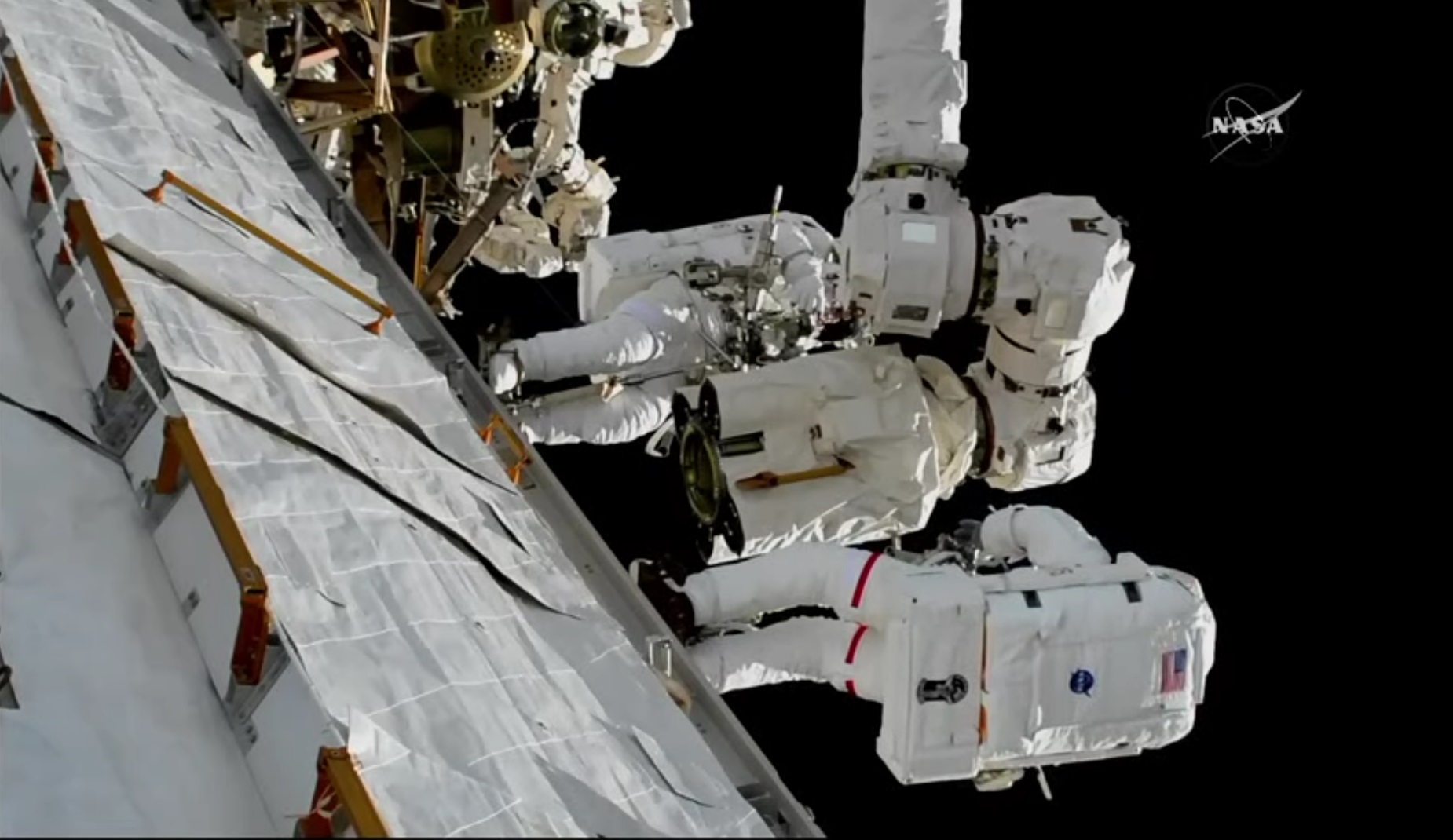
With the luxury of well over three hours of EVA time remaining, Mission Control pressed into a list of get-ahead tasks. Mark Vande Hei moved the foot restraint from LEE-B on Canadarm2 to a base point on External Stowage Platform 2 in order to begin a lengthy 2.5-hour task of lubricating LEE-B to ensure smooth motion of all its moving parts for the next several years. This was well known territory for him after completing lubrication of the new LEE-A last October.
Armed with a grease gun and Ballscrew Lubrication Tool (BLT), Vande Hei got right to work to transfer Braycote vacuum grease onto the Central Rigidizing Ballscrew in the center of the Latching End Effector where the snares reside. Next up were four latch ball screws in charge of deploying and retracting the four latches used to form rigid structural connections and a power/data bridge with whatever the arm is holding.
Although similar in nature to the central screw, the latch ballscrews are partially obscured from view, requiring Vande Hei to work mostly by feel when transferring grease onto the screws. ROBO operators Acaba and Tingle assisted him by rotating the LEE-A in between lubrication runs to provide the best possible access to the latches. Lubricating the latch screws took well over an hour, but Vande Hei continued working ahead of the timeline and was able to enter the final step of the three-step lubrication task.
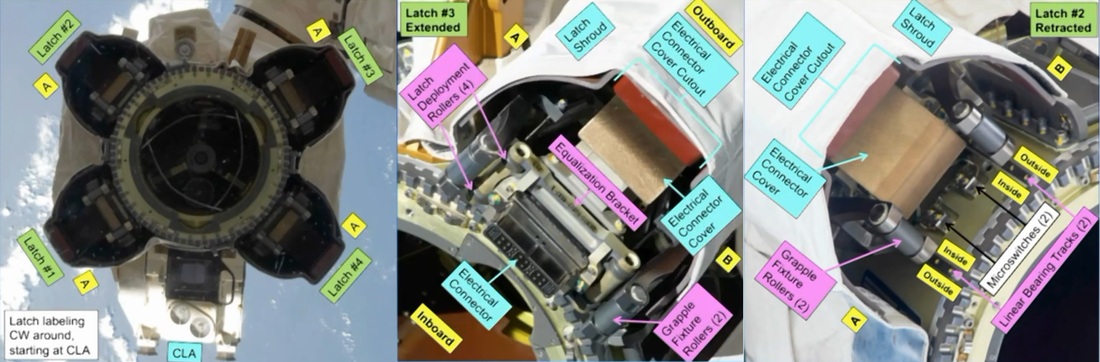

No longer working blind, Vande Hei proceeded into lubricating the linear bearing tracks that are directly accessible with the grease gun and do not require the BLT. He deposited vacuum grease to the inside and outside of the eight linear bearing tracks to make sure the LEE’s latches move smoothly over several years of operation.
While EV-1 went through the lubrication task, Norishige Kanai tackled a whole list of smaller get-ahead items, starting with the securing of the LEE Flight Support Equipment on ESP-2 that held the spare LEE installed on EVA-47. EV-2 then translated over to the Destiny Lab where the Dextre robot was set to receive an additional Remote Micro-Conical Tool so it can use its Enhanced ORU Temporary Platform (EOTP) to grapple external ORUs – continuing to expand the flexibility of the Station’s robots for more complex tasks down the road.
Kanai then translated forward to Node 2 Zenith where LEE-A of Canadarm2 had its base point for EVA-48. There, he installed a grounding strap on a Force Moment Sensor that provides the arm and its controllers with feedback on how much force it is exerting on the item it is holding.
Cleaning up the two crew members went back to the airlock, Vande Hei tackled one last get-ahead along the way by reconfiguring a strut on a Flex Hose Rotary Joint on ESP-2 before he also headed back inside Quest to close out the EVA with the official end marked at 17:57 UTC when repressurization was initiated.
