S-Net Constellation
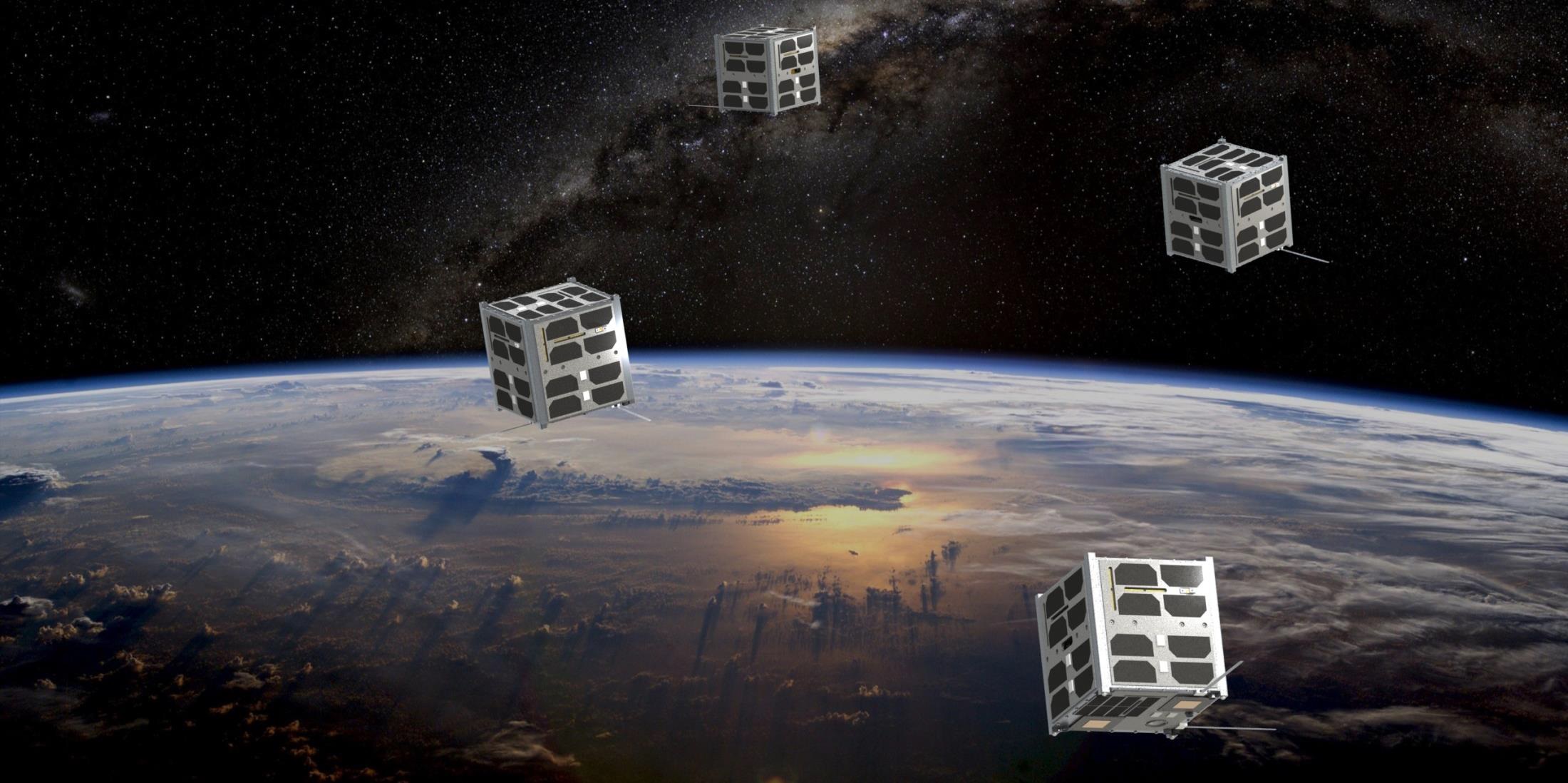
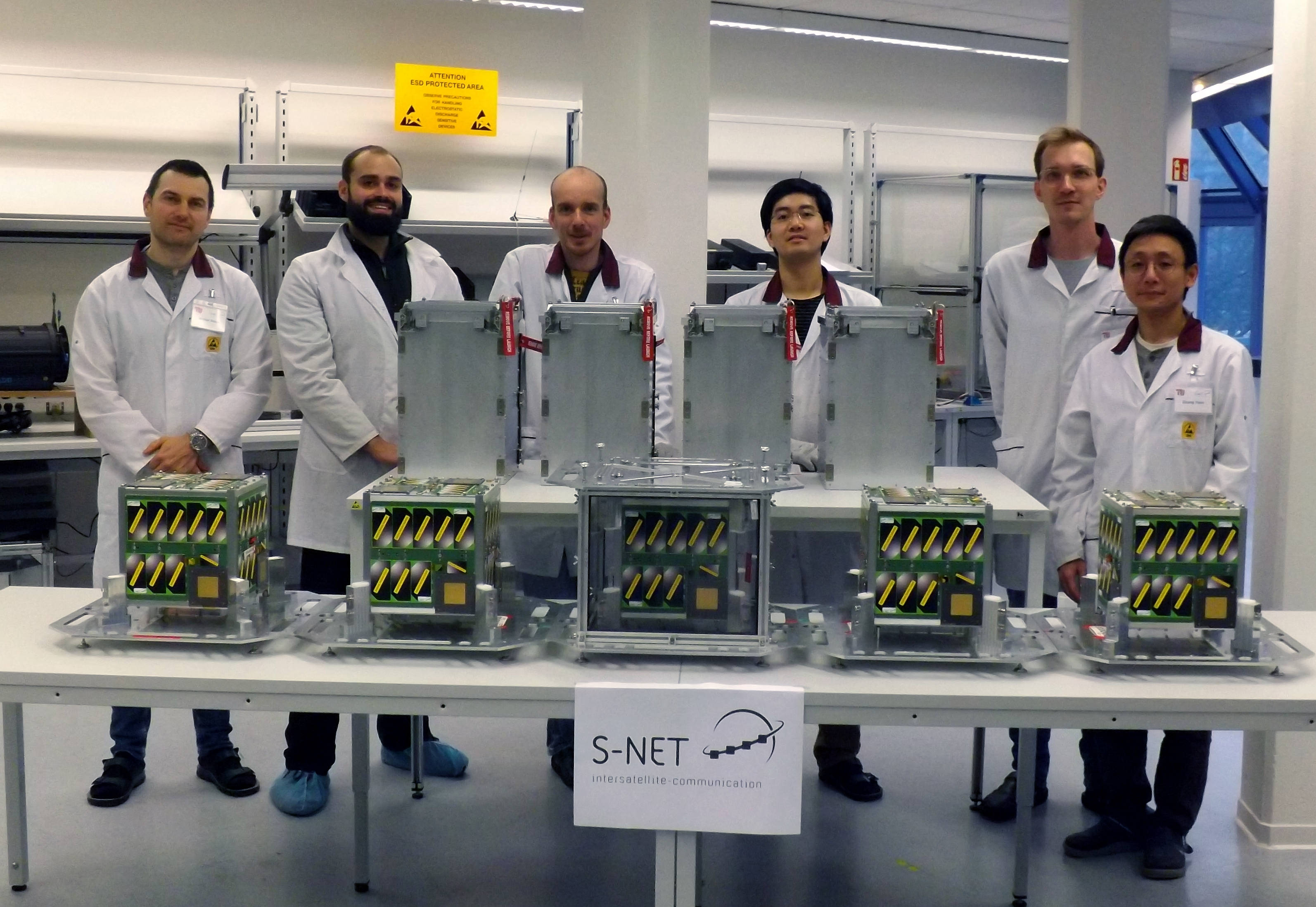
S-Net is a nanosatellite project of the Technical University of Berlin to investigate and demonstrate an inter-satellite communications network using an autonomous architecture for the management of large satellite constellations. Four nanosatellites are launching together on a Russian Soyuz rocket as part of a proof-of-concept mission for a distributed and autonomously operating nanosatellite network.
The miniaturization of spaceborne remote sensing systems have allowed satellites to get smaller in size, making CubeSats a viable means for conducting Earth-imaging, atmospheric sensing and communications. CubeSats can be manufactured in large numbers as part of an assembly-line style process and their launch cost is also minimal – allowing very large orbiting constellations to be created, Planet’s Doves and Spire’s Lemurs being leading examples. This creates a whole new challenge coming with the operational management of constellations with dozens or even hundreds of members.

S-Net proposes in inter-satellite communications and constellation management system to enhance the operational efficiency of distributed satellite systems with the ultimate goal of autonomous operation of large satellite swarms. TU Berlin and commercial company IQ Wireless developed a miniaturized S-Band transceiver called S-Link, capable of a 100 kbps cross-link between constellation members and 1 Mbps for downlink – allowing one system to double as inter-satellite communications system and data downlink terminal (eliminating the mass and volume concerns of needing two systems).
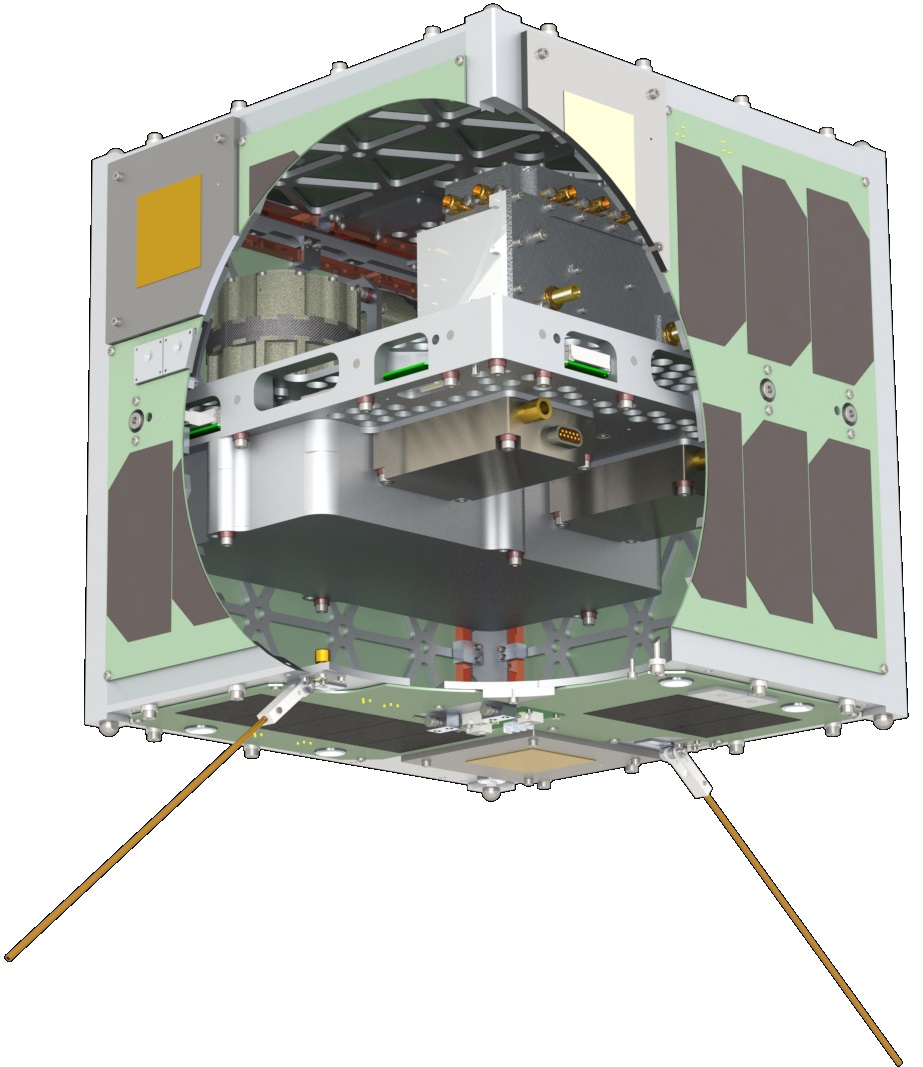
Each of the S-Net members is cubical in shape with a side length of 24 centimeters and weighs under 8.5 Kilograms, employing the TUBiX10 satellite platform (TU Berlin innovative neXt generation 10 kg nanosatellite platform).

The satellites use body-mounted solar cells for power generation and a three-axis stabilization system using MEMS sensors and magnetometers for attitude determination and reaction wheels & magnetic torquers to ensure proper pointing of the satellites for the different mission modes (pointing knowledge +/-5°, pointing accuracy +/-10°). Mission communications – satellite platform telemetry downlink and telecommand uplink – uses a 450 MHz, 2.4 kbps UHF link while S-Band is only used as part of the payload and its testing purposes.
The four satellites will be released from the Fregat Upper Stage in ten-second intervals to create the initial spacing between them and orbital dynamics will move them further apart over time to allow testing of the S-Band intersatellite link at distances up to 400 Kilometers.
A number of different communication link configurations will be tested by the four satellites including multi-hop communications between all four members and transmission of data to a ground station via relay by one or more constellation members and vice-versa for commanding the entire swarm via one space-to-ground and several space-to-space links.
The SLink terminal operates at the 2.0-2.2 GHz S-Band frequency with three specific frequency ranges chosen for downlink, uplink and inter-satellite link: 2210.2-2269.8 MHz for the inter-satellite link, 2212.0-2268.0 for downlink and 2024.2-2109.8 for uplink.
In addition to the SLink payload, the satellites carry a laser reflector for orbit determination and an optical camera. The uplink/downlink communications link can be operated for distances of 2,500 Kilometers or less while the lower-power inter-satellite link has a maximum distance of 400 Kilometers. SLink supports adaptive data rates of up to 3.39 Mbps for downlink, 270 kbps for uplink and 169 kbps for inter-satellite communications.
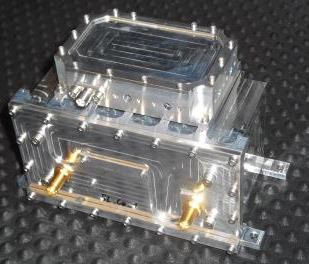
SLink weighs 174 Kilograms without its case and 0.4kg with, it communicates with the satellite via serial interface and delivers a radio output power greater than 0.5 watts.
All four S-NET members are carbon copies with the exception of the patterns of laser retroreflectors installed on their outside: five sides of each satellite have one laser retroreflector cube while the sixth side of each satellite hosts its own unique pattern to allow for satellite identification via laser ranging. For laser ranging support, the International Laser Ranging Service has been called up to provide regular, high-accuracy measurements of the relative distance between the satellites to correlate the transceiver signal travel time.
SLR data will be obtained as early as possible after launch to identify the individual satellites and reconstruct the deployment velocity and direction provided by the high-precision deployment canisters. Tracking in the early phase of the mission will also provide the orbital drift behavior of the constellation to propagate the formation drift and help re-plan the mission timeline.