
AISSat-3
AISSat-3 is the third Automatic Identification System Satellite as part of a constellation of ship-tracking satellites operated by the Norwegian government and built by the University of Toronto. The first AISSat launched in 2010 and successfully demonstrated the application of a space-based AIS terminal for tracking of sea vessel movements. After the success of AISSat-1, Norway ordered two more spacecraft, identical to the first, to ensure data continuity and expand to a constellation of AIS spacecraft.
The Automatic Identification System is used by sea vessels that send and receive VHF messages containing identification, position, course and speed information to allow the monitoring of vessel movements and collision avoidance as well as alerting in the event of sudden speed changes.
These signals can be transmitted from ship-to-ship and ship-to-shore to allow the monitoring of a local area, but deploying space-based AIS terminals allows a broad coverage and data relay to ground stations for monitoring of large sea areas. However, due to the large footprint of satellites, overlapping and signal collisions become a problem, especially for frequented traffic routes.

AISSat-3 uses SFL’s Generic Satellite Bus that provides all the required subsystems for the operation of a variety of payloads leaving about 30% of its total volume open for use by payloads. Using the same platform for several previous missions led to a quick build-up of flight heritage and performance data which is of great value when conducting experimental missions.
The satellite bus features a cubical design with a 20-centimeter side length using aluminum exterior panels and two internal trays to host the various satellite subsystems and create a payload bay for simple integration of satellite payloads of different kinds. Each CanX spacecraft weighs around 7 Kilograms.
Power is provided by four to ten triple-junction GaAs solar cells installed on each of the external panels delivering up to ten Watts of power using Peak Power Point Tracking provided by the Battery Charge/Discharge Units. At total of 36 cells are mounted on the spacecraft with an efficiently of 27%. Power is stored in two Li-Ion batteries with a capacity of 5.3 Ah. The power conditioning unit provides a 4-Volt unregulated power bus.
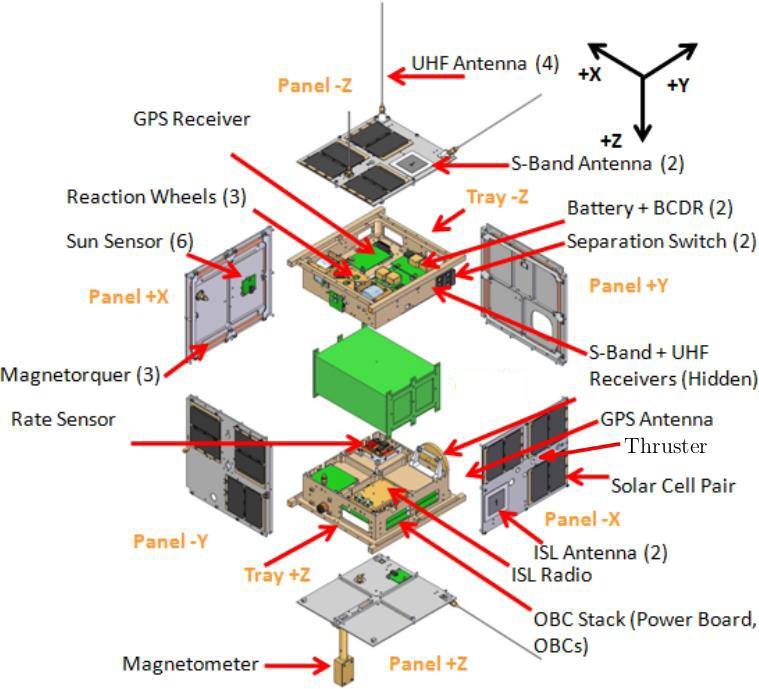
Attitude Determination is accomplished by a three-axis magnetometer, six sun sensors for fine and sun attitude determination and a star tracker for precise attitude determination. The Miniature Star Tracker provides three-axis attitude solutions at a control cycle at 0.5 Hz and an accuracy of 10arcsec. Attitude actuation is provided by three reaction wheels with a total mass of 185grams and a volume of 5 by 5 by 4 centimeters. The wheels have a momentum capacity of 30mNms and deliver a maximum torque of 2mNm. Momentum dumps are supported by three magnetotorquers.
Data handling and satellite control is provided by an ARM7 housekeeping computer that handles standard telemetry and communications while a second computer supports all attitude determination and control functions. Each processor board uses the ARM7/TDMI processor with a code memory of 256kB and 2MB of hardware SRAM memory used to store program variables and data. A 256MB flash memory is used for long-term data storage.
A third computer board is in charge of the operation of the payload and handles its data. This system was modified for AISSat – it interfaces with the AIS payload and collects the AIS messages received from ships and also receives data from a GPS receiver to provide accurate timing signals to data time-stamping. The computer allows different methods of data storage, processing and permits in-flight reconfiguration running on the Canadian Advanced Nanospace Operating Environment.
The communications system of the satellites includes a UHF receiver, an S-Band Transceiver and a VHF beacon. The UHF receiver will be used for the command uplink from the ground at a data rate of 4kbit/s in the amateur radio band using quad-canted monopole antennas for omni-directional coverage. The VHF beacon transmits the satellite’s identification and some basic telemetry values for satellite tracking and the initial commissioning of the spacecraft.
The main payload of the satellite is the AIS terminal that was developed at Kongsberg Seatex AS. It is a self-organizing Time Division Multiple Access radio communication system. This Software Defined Radio (SDR) approach allows for maximum in-flight flexibility as it allows full reconfiguration of the radio once in orbit.

The system uses a monopole antenna connected to a dual-channel VHF-receiver that can be tuned to any VHF band within the maritime VHF area of 156.025 to 162.025 MHz. When in operational mode, the VHF system is tuned to the AIS frequencies at 161.975 and 162.025 MHz.
Signals are converted in an analog to digital conversion system before being transmitted to a Field Programmable Gate Array. The FPGA processes the signals and transmits them to the payload microcontroller for storage in the spacecraft memory ahead of downlink. The microcontroller interfaces with the satellite platform via a serial RS-485 line which is used to transmit data packets to the S/C.
The AISSat constellation uses the Svalbard ground station in Norway which is in view for all 15 daily passes of the satellites in their polar orbit – enabling rapid data downlink after acquisition followed by processing and distribution. Data is sent to the Mission Control Center which is mostly automated in the generation of data products and notifications that are sent as status e-mails after each contact with the spacecraft. Satellite command uplink is required once a week as the spacecraft mostly run on time-tagged commands requiring only updating of orbital data and onboard clocks. While passing over the ground station, the satellite is capable of relaying real-time data to allow Norwegian authorities real-time insight into vessel locations within the satellite footprint.
