
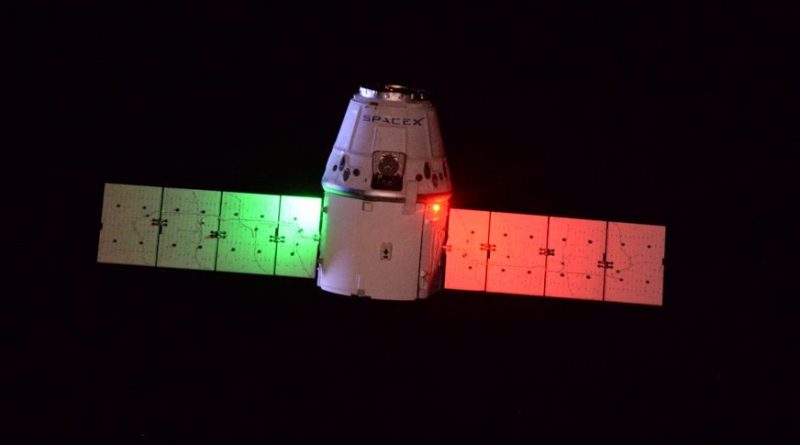
Dragon Cargo Craft successfully Captured by Space Station Crew after extended Rendezvous
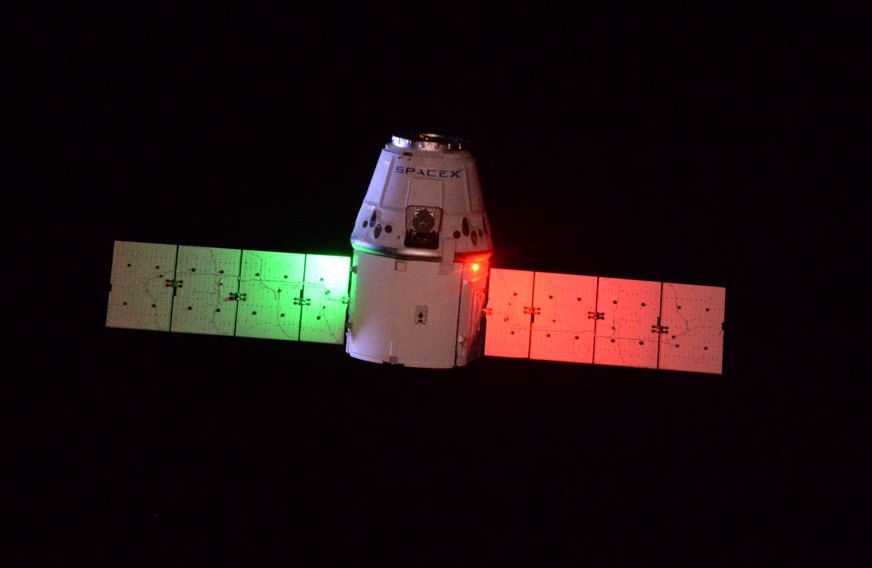
SpaceX’s Dragon cargo spacecraft arrived at the International Space Station on Thursday, captured by the Station’s robotic arm after an extended rendezvous that required Dragon to fly around the orbiting laboratory after a rendezvous attempt on Wednesday was waved off due to a problem with Dragon’s GPS navigation system.
Dragon’s arrival on Thursday marked the delivery of 2,490 Kilograms of cargo to the International Space Station with another two and a half metric tons inbound less than 24 hours after Dragon’s rendezvous when Progress MS-05 will link up with the Space Station for an automated docking on Friday.
Cargo delivered by the tenth operational Dragon mission is largely dedicated to ISS science and utilization with over half of the craft’s upmass dedicated to utilization. Riding aboard the spacecraft’s Trunk Section are a pair of external payloads to be installed on the ISS truss by the Station’s robots to carry out atmospheric studies and technical demonstrations.

SAGE-III is the third Stratospheric Aerosol and Gas Experiment that aims to continue a long-lasting record of ozone measurements dating back to the early 1980s when the first SAGE sensors saw the initial signs of human-caused ozone depletion. SAGE operated for nearly two decades on NASA’s TRMM satellite and showed measures implemented to protect the ozone layer were showing positive effects on global ozone. SAGE-III, a 527-Kilogram spectrometer package, will take up residence on an Express Logistics Carrier from where it can view the atmosphere to measure ozone concentration, atmospheric aerosols and other gases.
The second external payload inside Dragon’s Trunk is the Space Test Program- Houston 5 experiment pallet, flying under a NASA/Department of Defense Program dedicated to research and development of advanced spaceflight technology. A total of 13 experiments are installed on the external pallet, spanning across a number of areas such as Earth science, in-space computing, spacecraft navigation and materials science.
Loaded into the pressurized compartment of the Dragon are 1,530 Kilograms of cargo – broken down into 732kg of science investigations, 382kg of ISS hardware, 296kg of crew supplies and 43kg of computer resources, EVA equipment and Russian cargo.
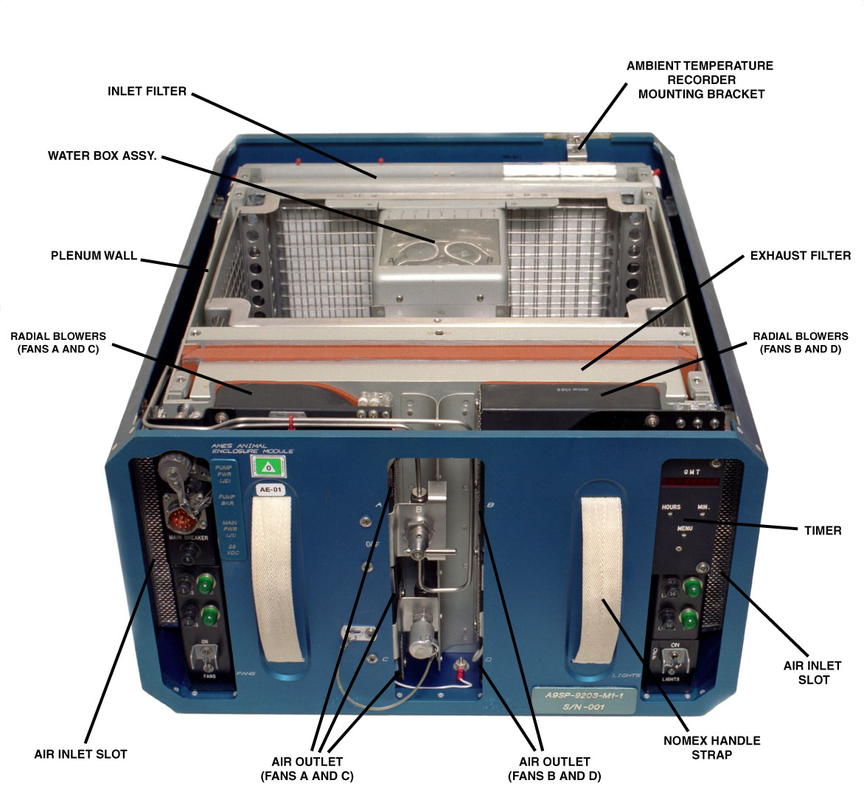
Among the science cargo is a group of 20 mice huddled inside the Dragon since late cargo loading last Friday and set for quick transfer to the Space Station’s rodent lab for a study of how bone tissues regenerate in the space environment. Other studies delivered by Dragon look at methods of preparing stem cells for use in medical treatments, protein crystal growth in microgravity and viral mutations in the space environment.
Lifted into orbit on Sunday by a SpaceX Falcon 9, Dragon was awarded a clean bill of health after initial testing and remained in its insertion orbit until Tuesday morning when the spacecraft began maneuvers link up with ISS circling the Earth 400 Kilometers in altitude. The spacecraft was just 1.2 Kilometers below the Station when, at 8:25 UTC on Wednesday, the onboard computer decided to abort the approach, safely flying past ISS after the spacecraft sensed the relative GPS data coming from ISS did not match up with what was expected at the time.

SpaceX and NASA teams diagnosed the problem and found that Dragon had been given an incorrect state vector for the International Space Station, explaining why Relative GPS data received through the communications link with ISS did not converge with the onboard data computation. The fix was relatively straightforward and mission controllers executed a 24-hour turnaround, a well-rehearsed procedure that calls for Dragon maneuvering several times to get into position to re-attempt the rendezvous.
For the 24-hour re-set, Dragon was to fly on a racetrack pattern – first pulling out in front of the Space Station before raising its orbit so that ISS could pass underneath and Dragon could again approach from behind. Orbital Data showed Dragon maneuvering into an orbit of 397 x 421 and then 407 x 415 Kilometers to allow ISS to overtake, then hitting the brakes to enter a 395 x 405-Kilometer orbit from where it could re-join the nominal approach profile.

Closing in from behind and below, Dragon executed a Height-Adjust/Coelliptic burn pair to get into a position 1.3 Kilometers below the Station’s orbit where Dragon headed toward the Approach Initiation point. With a fresh ISS state vector, Dragon was able to process Relative GPS data without issue, receiving GPS data from the Space Station and comparing it to its own GPS-derived position in order to precisely calculate the relative geometry between ISS and Dragon for proper burn targeting.
Around 8:15 UTC, Dragon pulsed its Draco thrusters for the 0.3-meter per second Approach Initiation burn – putting the spacecraft on a path to a point 350 meters directly below the Space Station where the craft arrived just after 9 UTC. Acquiring the R-Bar, or ISS radial vector, Dragon stopped its approach and made a 180-degree yaw maneuver to properly position the craft’s grapple fixture for the capture and orient the thrusters for a possible posigrade abort maneuver.

Dragon then proceeded to the 250-meter hold point, switching to its Proximity Navigation System featuring a LIDAR that bounces laser beams off reflectors on ISS for range and rate measurements and a thermal imager that captures the relative geometry between ISS and Dragon. With no issues present, Mission Controllers in Houston and at MCC-X in Hawthorne gave a GO for an early hold departure.
Firing its thrusters, Dragon sailed up the R-Bar for the next 33 minutes to arrive at the 30-meter hold point at 10:00 UTC – a planned 20-minute hold dedicated to a final verification of Dragon’s navigation system and capture preparations by the crew. In charge of flying the robotic arm on Thursday was ESA Astronaut Thomas Pesquet, backed up by Expedition 50 commander Shane Kimbrough who handled communications with Mission Control and monitored Dragon’s status.

Mission Control gave the all-clear for Final Approach and Dragon ever so gently fired its thrusters at 10:20 UTC to initiate a small closing rate for a 16-minute ascend toward the Capture Point, just ten meters from the modules of ISS and well within reach of the 18-meter Canadarm2. Upon arrival at the Capture Point, Dragon’s status was verified and a GO given to the crew to put in motion the capture procedure at their own pace, releasing the brakes on the robotic arm and commanding Dragon into Free Drift after the craft had nulled out any relative motion.
Using the hand controllers of the Cupola Robotics Workstation, Pesquet aligned the Latching End Effector with Dragon’s grappling pin before closing in for the capture. Snares closed once the end effector was over the pin and a good capture was confirmed at 10:44 UTC. Words of congratulation were passed between Mission Control and ISS after a very smooth rendezvous of the Dragon, coming one day after the spacecraft was forced to take the scenic route to ISS.

With Dragon firmly grasped by the arm, robotic duties were handed from the crew to ROBO Controllers in Houston who will be in charge of the berthing of the craft.
The ISS crew had voiced intentions earlier that they were planning to work a long day to get to Dragon hatch opening by Thursday evening in order to gain access to the time-critical research payloads on the Dragon that are coming close to thermal and consumable constraints due to the one-day delay of launch, the initial extended three-day rendezvous trajectory plus Wednesday’s rendezvous abort.
After capture, MCC-X sent commands to safe Dragon’s propulsion system and configure its solar arrays for berthing while the crew completed safing of the robotic arm before they headed off to other operations.

Over the course of an elaborate, multi-hour process, Canadarm2 maneuvered the Dragon first to a stand-off distance to the Harmony module for an inspection of the rubber rings in the craft’s berthing mechanism before moving in for the berthing. Using the Centerline Berthing Camera System, Dragon was positioned with millimeter-accuracy with four Ready-to-Latch Indicators verifying that the Common Berthing Mechanism was ready to be bolted down.
Four Capture Latches were closed to achieve what is known as First Stage Capture that allowed the arm to switch to limp mode and give Dragon some wiggle room for the second capture stage. Four sets of four bolts were driven to tightly pull the Common Berthing Interfaces together and form a pressure tight seal, marking Dragon’s structural attachment to ISS at 13:12 UTC.
Post-berthing steps include loading each bolt with a specific torque before the crew can pressurize the vestibule between ISS and Dragon for the standard leak check.

When the Harmony hatch is opened, the crew will get started with the lengthy Vestibule Outfitting task that includes the removal of four Control Panel Assemblies that were used to drive the CBM bolts, the installation of power and data jumpers and the removal of the Central Disk Cover.
Hatch opening on the Dragon will be preceded by pressure equalization and the crew donning protective gear to ensure floating debris, if present inside the vehicle, can not harm the ingressing crew members. After a cursory inspection of Dragon’s interior, the crew will obtain air samples and install ventilation equipment to officially mark Dragon open for business.
The Dragon is booked for a five-week stay at ISS, facilitating a busy cargo transfer and experiment schedule for the ISS crew and equally busy robotics work on the outside as the two external payloads are set for installation on their respective locations on the truss while three no-longer-needed payloads (OPALS, the Robotic Refueling Mission, and a MISSE support bracket) will be installed in the Dragon Trunk for disposal.