
First Expandable Habitation Module set for Installation on Space Station
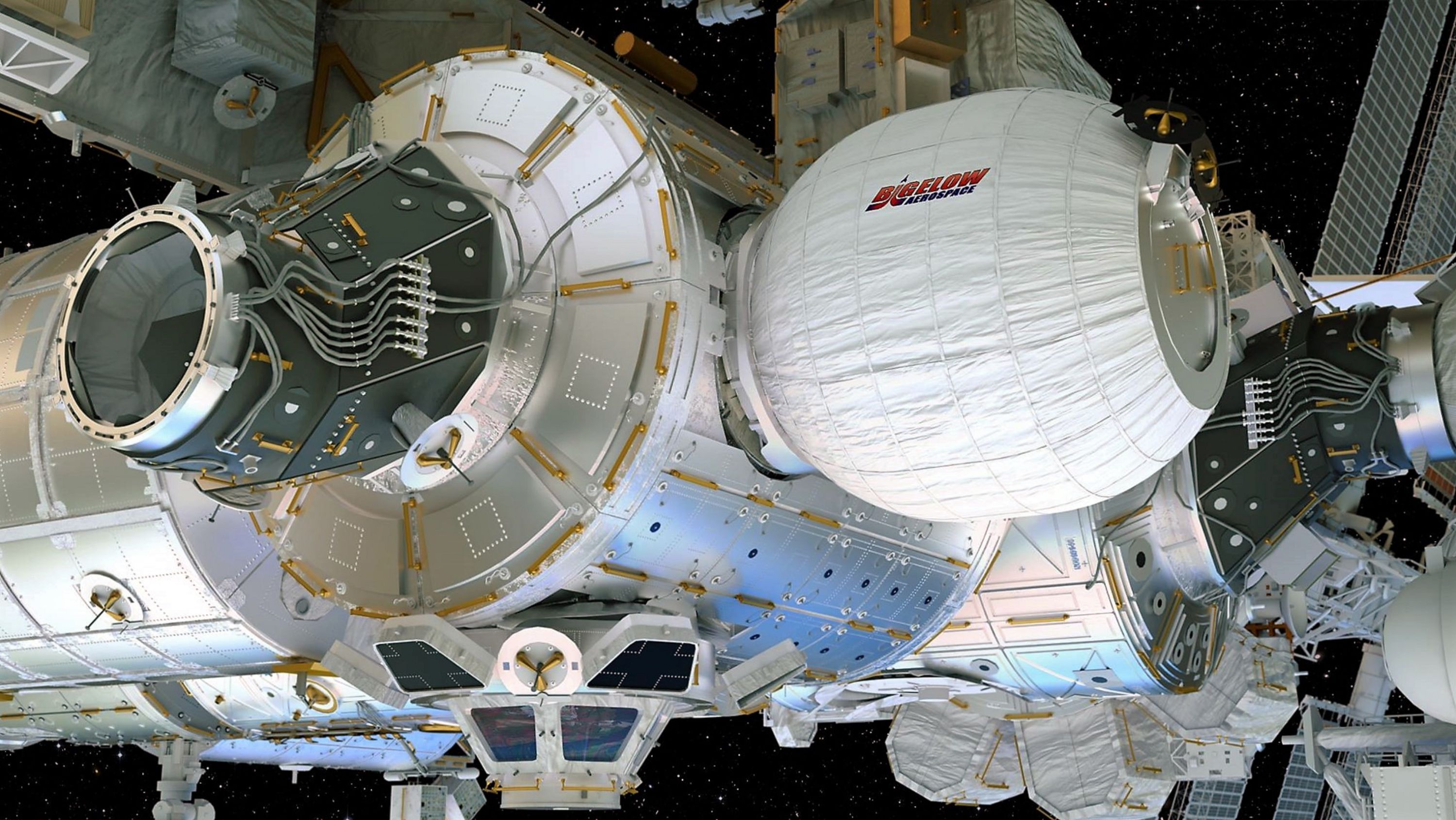
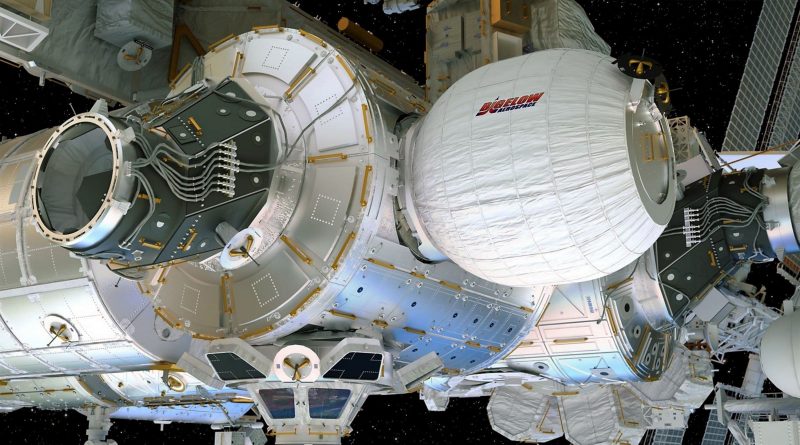
The stage is set aboard the International Space Station for the robotic installation of the Bigelow Expandable Activity Module on Saturday to become the first inflatable habitat to be attached to ISS. Delivered by the Dragon SpX-8 spacecraft last week, BEAM is looking forward to attachment to the Node 3 Module followed by inflation in late May for a two-year stay at ISS in a long-duration demonstration of expandable habitat technology.
The Las Vegas based company Bigelow Aerospace has been working on expandable habitat technology since its formation in 1998 and launched a pair of free-flying test modules in 2006 and ’07 designated Genesis I and II. The concepts for multi-layer, expandable module technology were licensed from NASA and Bigelow implemented a number of improvements to the structure of the inflatable materials. After two successful demonstration flights, Bigelow partnered up with NASA in 2010 for the first concept reviews for flying an expandable module to ISS.

The contract for the BEAM mission was signed in late 2012 with a value of $17.8 million and a launch date planned in 2015. BEAM is similar, but not identical, in size and construction to the Genesis modules but does not use solar arrays and its expandable hull may consist of a different number of layers. An addition to the early Bigelow modules is the Common Berthing Mechanism attaching the module to the Space Station.
The deployed BEAM spacecraft has a mass of around 1,360 Kilograms and in its deployed configuration measures 4 meters in length and 3.2 meters in diameter with a living volume of 16 cubic meters. In its stowed launch configuration, BEAM measures 2.4 meters in diameter and is only 1.7 meters long – fitting inside the Trunk Section of the Dragon spacecraft.
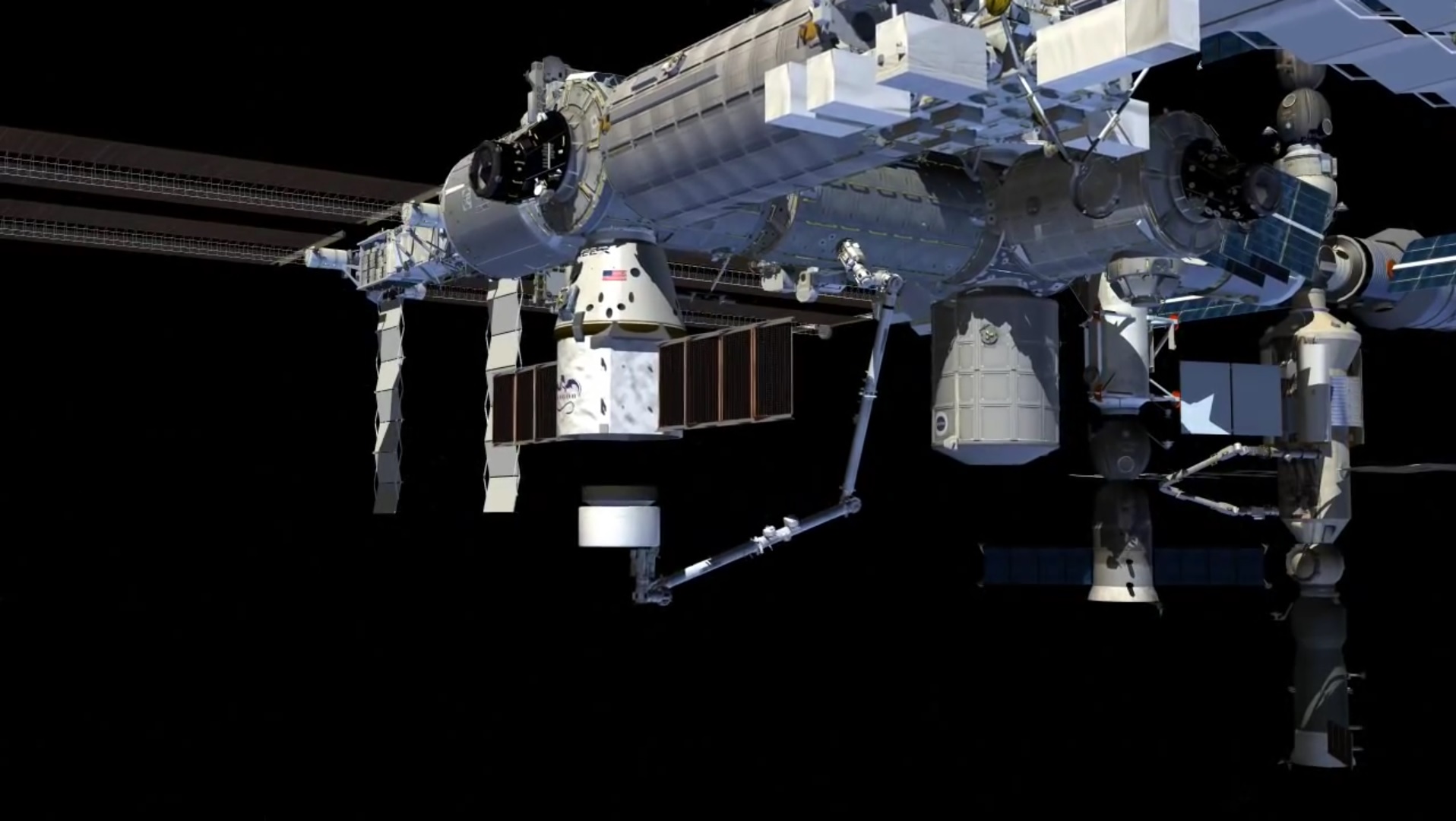
Dragon lifted off atop a Falcon 9 rocket last Friday and completed a flawless rendezvous with ISS on Sunday, being opened for business on Monday when the spacecraft hatch was opened to give the crew access to food, hardware and science delivered by the SpX-8 mission. The setup for the installation of BEAM started on Monday when the robotic arm ungrappled the Dragon spacecraft and walked off to the Lab Power Data Grapple Fixture. The arm was then used to conduct a survey of the Dragon Trunk and BEAM Module to verify the hardware was in the expected condition after its ride into space.
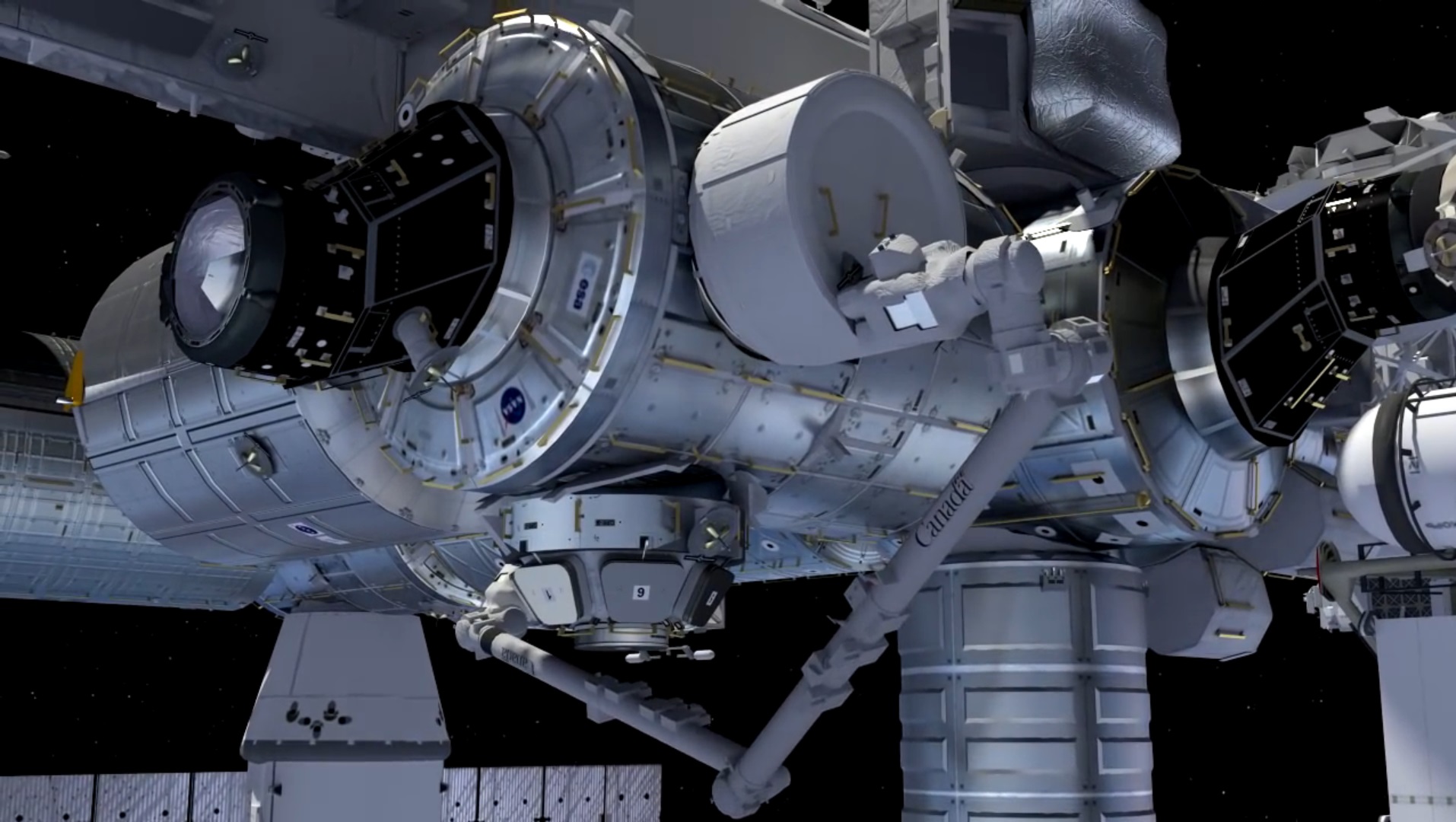
On Wednesday, the Centerline Berthing Camera System was installed in Node 3 to provide guidance for the berthing of BEAM when being maneuvered into position on the aft-facing CBM of the module.
Saturday’s robotic operation will begin around 6:15 UTC and will take approximately four hours. For the installation, BEAM will be grappled by the Station’s robotic arm under ground control before it is released from the Dragon Trunk to be extracted. Once clear of the trunk, the arm will complete a series of maneuvers to position BEAM at a stand-off position to the Node 3 berthing port in order to permit an inspection of BEAM’s berthing mechanism, ensuring it is free of damage or foreign objects.
ROBO controllers will precisely position BEAM in its pre-berthing position, using four Ready-to-Latch indicators for guidance. When all RTLs show green, commands will be issued to close four capture latches and achieve what is known as Stage 1 Capture. Afterwards, the robotic arm will be commanded to go into limp-mode, providing BEAM some wiggle room to move in towards Node 3 when CBM bolts are driven. Four sets of four bolts will be driven to tightly pull the two CBM interfaces together and form a triple redundant pressure seal.
Typically, vestibule pressurization would be performed after final bolt-loading is completed to ensure the integrity of the pressure seal between the modules. However, the timeline for BEAM may be somewhat stretched since inflation of the module is not planned until the late May time frame.

NASA decided to await a period of high Beta Angles in late May for the inflation of the module when the currently docked Cygnus and Dragon spacecraft will have departed the Space Station, creating a gap in vehicle activities.
For the inflation, the crew aboard ISS will manipulate the Pressure Equalization Valve in BEAM’s hatch to expand the module. Inflation will be completed in stages and external cameras will be used to document the process in detail.
The crew will ingress the BEAM module for the first time around a week after inflation to put in place a number of sensors. Sensors installed on BEAM will include temperature, pressure and radiation sensors as well as instrumentation to document debris impacts. Outfitted with sensors, BEAM will remain mostly uninhabited by the crew, except for three or four ingresses per year to allow the crew to conduct internal surveys and collect sensor data.
BEAM is significantly smaller than the operational modules that are being developed by Bigelow for a number of commercial applications. Earlier this week, Bigelow and United Launch Alliance announced a partnership for the launch of the first BA-330 habitation module in 2020, either as a free-flying module or as attachment to the Space Station if an agreement can be reached with NASA. The module will have a pressurized volume of 330 cubic meters, hence its numeric designation, measuring 6.7 meters in diameter and 13.7 meters in length with a launch mass of 20 metric tons.

A pair of BA330 modules will be ready for launch in 2020 to be used for a variety of purposes like commercial research by educational institutions, commercial companies and foreign government customers. Beyond its industrial and scientific applications, BA330 may become a destination in space tourism and serve as a human spacecraft for missions to the Moon and Mars.
For the near term, Bigelow will be focused on their first module headed to ISS as BEAM is set to gather extremely valuable data for future improvements to create operational systems that could very well be part of interplanetary spacecraft to provide crews with abundant living volume on their journey to distant targets.