
Cygnus inbound for Rendezvous with Space Station in record-setting Cargo Delivery Mission

Orbital ATK’s Cygnus spacecraft is set for its rendezvous with the International Space Station on Wednesday to mark a record-setting cargo delivery in the Commercial Resupply Services Program. Going through a methodical rendezvous process, Cygnus will link up with ISS to arrive at its Capture Point where it can be grappled by the Station’s robotic arm to mark the start of a berthed mission of up to two months. The robotic capture of the spacecraft is set for 11:10 UTC.
Cygnus OA-4, also known as the S.S. Deke Slayton II, is one of two interim Cygnus missions launching atop the Atlas V rocket to bridge the gap until the upgraded Antares rocket is ready and the launch pad at the Wallops Flight Facility can support missions again when repairs and tests are complete to recover from 2014’s Antares launch failure. Owed to the power of the Atlas V rocket, Cygnus – for the first time flying in its enhanced configuration – is loaded to its maximum capacity, holding 3,500kg of supplies for the Station.

The Atlas V rocket carrying the Cygnus spacecraft finally got off the ground on Sunday after a string of weather-related delays. Thundering off at 21:44 UTC under the loud thunder of its powerful RD-180 engine, Atlas V swung to the north-east for a trip across the Atlantic, departing Florida’s space coast. Observers along the East Coast were treated to good visibility of the launch including the re-entry of the first stage after it had separated from the Centaur upper stage four and a half minutes into the flight. Centaur completed a 14-minute burn to place Cygnus into an initial orbit of 234 by 237 Kilometers. For Centaur, the flight ended with a ten-second deorbit burn 48 minutes after launch to set up for disposal of the stage south of Australia.
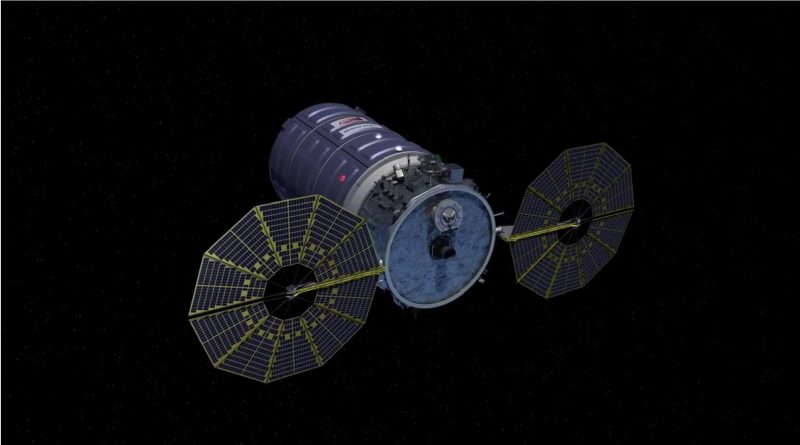
The Cygnus spacecraft successfully carried out its initial steps in orbit that consisted of the initiation of communications with the ground and the acquisition of three-axis control. A first set of checks was performed by the Mission Control Team in Dulles, Virginia before Cygnus was commanded to deploy its new, circular UltraFlex solar arrays one hour and two minutes after launch. In a sequence lasting 18 minutes, both arrays were released from their launch locks, swung outward and reached their fully deployed state with power being passed to the batteries of the spacecraft.
Starting out in its initial Low Earth Orbit, Cygnus performed its first large delta-v maneuver around four hours after launch followed by the next one on Monday in addition to a plane adjustment maneuver. A pair of burns was available on Tuesday to adjust the craft’s trajectory. On Tuesday, the craft was tracked in an orbit of 405 by 419 Kilometers, slightly higher than ISS that was flying in a 398 by 409-Kilometer orbit. Cygnus will again descend from its orbit to set up an approach to ISS from below and behind.
At around 7:55 UTC on Wednesday, Cygnus is expected to reach its Joint Targeting Reference Point which marks the start of integrated operations of Mission Control Houston & Orbital’s Control Center in Dulles. MCC-H will have the overall authority over decisions related to the progress of the rendezvous while Cygnus control monitors the status of the spacecraft, advises Houston and commands Cygnus as directed.
As Cygnus enters the ISS Communications Zone at a range of about 28 Kilometers, a two-way communications link will be established between ISS and Cygnus to enable the vehicle to switch from absolute GPS navigation to relative GPS.
As part of the Relative GPS Phase of the rendezvous, Cygnus receives GPS data from ISS that is used to compare it with its own GPS data to calculate relative position, velocity and motion. Good Rel GPS Data is required to guide Cygnus to its approach initiation point. GPS data will be verified by Mission Control and good onboard targeting will also be assessed by the teams.
Cygnus will continue in its orbit 4 Kilometers below ISS before reaching the proper position for the first Approach Burn, ADV-1, set for ~8:20 UTC. This small BT-4 engine burn will increase the apogee of the orbit in order to get closer to the Space Station. To circularize the orbit, Cygnus will have to coast up to apogee for the next burn after 35 minutes to raise the perigee so that the vehicle remains at a constant distance below ISS.
While approaching ISS in this –1.4-Kilometer Orbit, Cygnus has to verify that it can be commanded from the Space Station. Once Cygnus enters the ISS Approach Ellipsoid, the USOS Space Station crew members will set up shop inside the Cupola – getting ready for upcoming rendezvous procedures. The crew members configure the Robotics Work Station and begin monitoring the approach of the vehicle per the Rendezvous Checklist.
Wednesday’s Cygnus Rendezvous will be supported by Kjell Lindgren who is the primary robotics operator, in charge of commanding Canadarm2 and driving it for the capture of the spacecraft. Backing up Lindgren will be Scott Kelly who will operate the Hardware Command Panel to send commands to the Cygnus spacecraft and monitor its approach to the Station. Kimiya Yui will also be in the Cupola with cameras on hand to acquire photos of the Cygnus spacecraft.
The Cygnus spacecraft will establish a two-way communications link with the station in order to receive commands and transmit housekeeping telemetry. A good communications link with ISS is crucial because crew members aboard the Station need to have the ability to send commands to the spacecraft as it approaches.
Cygnus is using the JEM PROX System (Japanese Experiment Module Proximity Communications Equipment) to receive commands that are sent via the HTV Hardware Command Panel that is operated by the crew. Although Cygnus and HTV use different settings and command sequences, the Commands that are sent by the crew to the vehicles are similar: HOLD (stop where the vehicle is at that time), RETREAT (to the previous hold point) and ABORT (perform a burn to escape the vicinity of ISS).


With Cygnus in its –1.4-Kilometer orbit, the station crew members will send a test command to Cygnus to make sure it can receive and process commands sent via the Hardware Command Panel.
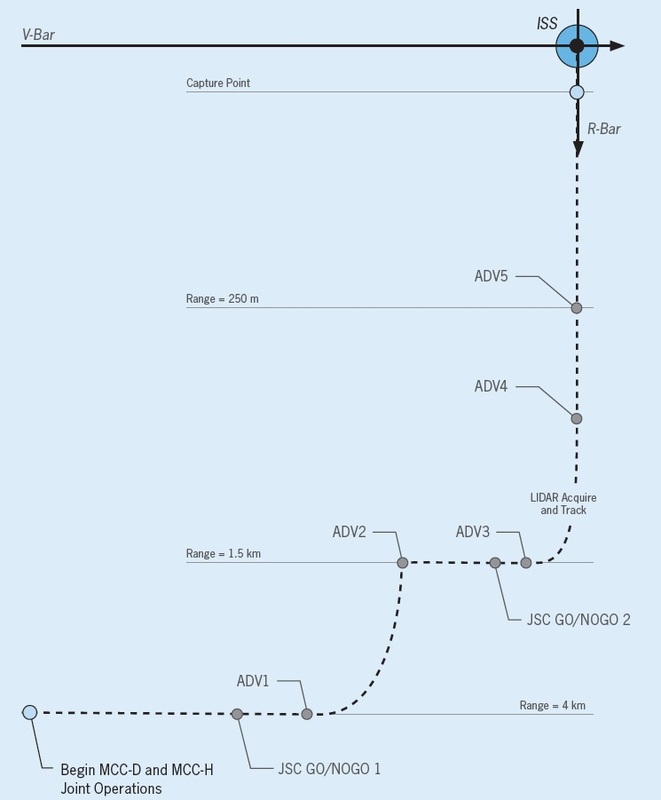
At Mission Control, another set of polls comes up for the GO/No GO for the approach initiation burn set for 9:40 UTC, also called ADV3. This burn puts Cygnus onto its trajectory towards the R-Bar – an imaginary line connecting the Space Station with the center of the Earth. As Cygnus approaches from below, the Space Station crew will be stationed inside the Cupola to monitor the rendezvous, making sure Cygnus remains inside its approach corridor.
As the vehicle arrives near the R-Bar on its way to a point directly below ISS, Cygnus switches to Proximity Navigation Mode using data delivered by TRIDAR. The TriDAR system does not rely on any reference markers positioned on its target. Instead, TriDAR uses a laser-based 3D sensor to collect 3D data of its target that is compared by software with the known shape of the target spacecraft.
This enables the system to calculate relative position, range and relative velocity. The computer algorithm is capable of calculating the 6 Degree Of Freedom (6DOF) relative pose in real time using a More Information Less Data (MILD) approach. TriDAR’s advanced 3D sensor will combine auto-synchronous laser triangulation technology with laser radar (LIDAR) in a single package to provide tracking data at short and long range.
As soon as Cygnus arrives on the R-Bar – about 350 meters below ISS, the spacecraft performs Approach Burn 4 in order to stick to the R-Bar and approach for 100 more meters until the 250 meter hold point comes up at approximately 10 UTC.
Once holding 250 meters below ISS, Cygnus will undergo a number of verifications to make sure the Navigation System is functioning properly and the spacecraft is in a nominal attitude within the approach corridor. After all checks, Mission Controllers will be polled for their GO/No GO to resume the approach from 250 meters after a hold of around 15 minutes.
Once re-starting the rendezvous by gently firing its thrusters, Cygnus will be allowed to approach to its next pre-programmed hold point, entering the Space Station’s Keep Out Sphere. The KOS is a 200-meter sphere around ISS in which the highest safety standards have to be met by visiting vehicles.
At a range of 55 meters, good TriDAR navigation is verified and at 30 meters, Cygnus enters its next hold – expected to last ten minutes.
After final reviews of performance criteria, Mission Controllers are polled for final approach. When the hold is complete, Cygnus begins its final approach to the Capture Point – 10 meters from ISS, within the reach of Canadarm2. The transition to the capture point takes about 20 minutes and Cygnus is expected to enter its Capture Hold at 11:05 UTC (earliest Capture point arrival).
As soon as Cygnus arrives at the Capture Point, within the SSRMS capture volume, it will zero-out any relative motion between itself and ISS which is verified by mission controllers before the vehicle is commanded to go to Free Drift. ISS also switches to a fine attitude hold before Kjell Lindgren starts to drive the robotic arm for the capture.
The SSRMS Video & Data Grapple Fixture is located on the aft end of Cygnus. The crew will align the End Effector of Canadarm2 with the grapple fixture before starting the capture sequence, placing the End Effector over the grapple fixture and initiating snares to close in order to capture the spacecraft. Capture will be confirmed as soon as Canadarm2 has a firm grip of the Cygnus spacecraft. Because there is some wiggle room in the timeline for Cygnus’ rendezvous, an exact time for the capture can not be given. The first capture window extends about 47 minutes, closing about 25 minutes after the expected Capture Point arrival, also allowing an early capture – if possible.
Following a series of post-capture reconfigurations, Canadarm2 will begin berthing operations. To save crew time, the berthing procedure is completed almost entirely by ROBO controllers on the ground that will take care of the bulk of lengthy maneuvering to move Cygnus into position for berthing with the Unity module.