

Video: CubeSats Deployed from International Space Station

Five small CubeSats were deployed from the International Space Station on Monday via NanoRacks’ commercial deployment mechanism that allows ISS to serve as an orbital launch pad for educational and commercial satellite missions of short duration.
Operations started in the early hours on Monday when the small airlock on the Japanese Kibo module was opened and the NanoRacks CubeSat Deployer was moved to the outside, grappled by the Japanese robotic arm that then moved the deployer to the proper direction for safe satellite release from ISS without risk of re-contact. The first deployment of the day occurred at 10:25:01 UTC when two Lemur-2 satellites were sent on their way for operator Spire Global, joining a constellation of CubeSats delivering meteorological and ship-tracking data. Another pair of Lemurs followed at 15:05:00 UTC and the final deployment of the day was TechEdSat5, operated by San Jose State University and NASA’s Ames Research Center for research into passive, targeted sample return capabilities.
All five satellites deployed on Monday were flown to ISS aboard the HTV-6 cargo spacecraft last December along with a group of Japanese CubeSats that were sent on their way in deployment cycles in December and January. The next batch of CubeSats headed to the Space Station is set for liftoff on March 20 (UTC) aboard the Cygnus OA-7 cargo craft that will deliver more than two dozen CubeSats to ISS belonging to the QB50 Project.
About TechEdSat5

TechEdSat5 is a 3U CubeSat that continues a project by San Jose State University and NASA Ames looking into drag brake technology and the possibility of sample return from Low Earth Orbit by CubeSat-sized craft.
The first TechEdSat, a 1U CubeSat, was among the first group of CubeSats released robotically from ISS back in October 2012, completing a demonstration mission of the proposed CubeSat platform for future TES missions. Next was TES-3 in 2013, flying as a 3U CubeSat and marking the first flight of the Exo-Brake passive deorbit system to serve as a precursor to larger projects aiming to make passive deorbitation controllable – an important factor for sample return missions. TechEdSat-4 launched in 2014 and was similar to TES-3 with an improved tension-based Exo-Brake and a beefed up communications system for more frequent downlink opportunities.

The main objective of TES-5 is to improve uncertainty analysis for eventual controlled flight through the thermosphere to achieve a controlled return architecture. Data delivered by the mission will improve prediction models for the satellite’s re-entry location, demonstrate basic technology for sample return from an orbital platform and deliver data for an On-Orbit Tracking Device that could find use in predicting the orbital evolution of items jettisoned from ISS.
The TES-5 satellite features a new Wireless Sensor Module (WSM) which provides a WiFi-based wireless network for multiple sensors and the satellite uses an avionics package based on NASA’s PhoneSats. The 3.5U CubeSat hosts a modulating exo-brake that can actively modify its surface area (nominally 0.35m²) to control the satellite’s descent toward the atmosphere in order to coarsely control the entry point.
The Exo Brake is a deployable device for use in free molecular flow regimes in an exo-atmosphere environment. The device is a tension based structure that has a number of advantages over other designs such as high stability and the possibility of drag modulating to provide targeting capability.
TES-5 is hoped to deliver data over the course of a four-week re-entry experiment to help understand the thermophysics of the Exo-Brake for scale-up in the future to permit a re-entry within 1.5 days using GPS data to control the exospheric descent and set up for re-entry at a specific location.
Lemur-2

Spire, formerly NanoSatisfi, inaugurated the Lemur project in 2014 with the launch of the Lemur-1 prototype satellite atop a Soyuz Rocket. The primary purpose for that mission was to demonstrate the satellite platform and support systems, not the operational payloads. In place of the meteo & ship-tracking equipment, Lemur-1 featured a pair of Earth-observation payloads, a medium-resolution color camera and a low-resolution infrared imaging system.
Lemur-2 was inaugurated in 2015 with the launch of four satellites atop an Indian PSLV, introducing the STRATOS and SENSE instruments. Over the course of the program, Spire plans to implement incremental improvements of the satellites and add more sensors. The next generation of Lemurs, debuting around 2018, will feature an ADS-B terminal for tracking of aircraft on a global scale.

The goal of the Lemur project is to establish a constellation of small, inexpensive satellites in operation for a number of purposes such as Earth observation, maritime monitoring, communications, meteorology and science.
The Lemur-2 satellites, each weighing 4.6kg & complying with the 3U CubeSat form, carry two different payloads, SENSE, dedicated to maritime monitoring, and STRATOS for atmospheric measurements.
SENSE consists of an AIS receiver that can record signals sent by the Automatic Identification System of ships using the VHF frequency. The Automatic Identification System is used by sea vessels that send and receive VHF messages containing identification, position, course and speed information to allow the monitoring of vessel movements and collision avoidance as well as alerting in the event of sudden speed changes.
These signals can be transmitted from ship-to-ship and ship-to-shore to allow the monitoring of a local area, but deploying space-based AIS terminals allows a broad coverage and data relay to ground stations for monitoring of large sea areas. However, due to the large footprint of satellites, overlapping and signal collisions become a problem, especially for frequented traffic routes, requiring a steady improvement in reception technology to separate the different signals.
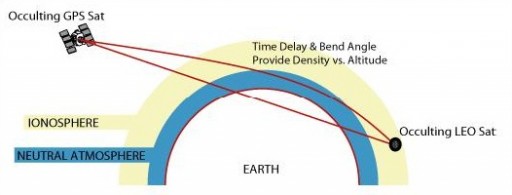
STRATOS makes use of GPS occultation measurements to determine temperature, pressure and humidity profiles of Earth’s atmosphere for application in operational meteorology.
The instrument consists of GPS receivers to be able to track the signals of several MEO satellites and measure the time delay and bend angle of signals that travel through the atmosphere located in the line of sight of the two spacecraft. These phase delay measurements due to refraction by the atmosphere can be made from the satellite altitude to very close to the surface leading to precise information on the properties of the atmosphere at an accurate vertical resolution.
