

Space Station Robotic Arm Receives New Grappling Hand in Challenging 7-Hour Spacewalk

Two U.S. spacewalkers successfully changed out a grappling mechanism on the International Space Station’s Canadarm2 on Tuesday, essentially giving the Station’s most important robotic asset a brand new hand to continue grasping external hardware and visiting spacecraft until the end of the ISS program.
Third-time spacewalker Mark Vande Hei and EVA rookie Scott Tingle spent seven hours and 24 minutes outside the Station and successfully checked off the primary objective of the 206th EVA performed in support of ISS Assembly and Maintenance. They successfully removed the degraded Latching End Effector B (LEE-B) from the Canadian-built robotic arm and bolted in its place a pristine spare that had been pre-staged outside ISS in 2009 to guarantee the arm, and its two-armed colleague Dextre, can remain in operation.
Although the EVA successfully achieved its major objective, getting there was not at all trouble-free for the two spacewalkers and teams on the ground, overcoming stubborn bolts, tight clearances and a communication problem with the new LEE – causing the planned five-hour LEE replacement to turn into a seven-hour effort.

Building on work completed in October that accomplished the swap of LEE-A, Canadarm2 can now enjoy two fully functional and effectively brand new grappling mechanisms with recent work showcasing the arm’s ability to be fully maintainable in orbit. With Canadarm2 back to full working order, priority now shifts to the second of the two planned spacewalks on January 29 that will re-shuffle the removed LEEs in order to return the unit in worse condition to the ground while the former LEE-B takes on a new career serving as a temporary payload holding platform.
Tuesday’s spacewalk was the first in another busy EVA year expected on ISS with major activities upcoming on both the U.S. and Russian Segment of the complex. EVA activities will continue on January 29 with USOS EVA-48 by Mark Vande Hei and Norishige Kanai to finish the work related to the Mobile Servicing System via the LEE swap while Russian Cosmonauts Anton Shkaplerov and Aleksandr Misurkin are gearing up for an EVA on February 2nd to install a new high-gain antenna on the Russian Service Module.

Another two or three U.S. EVAs are currently planned around May to complete the installation of External Wireless Antennas and new external HD cameras as well as the relocation of a Pump Flow Control Subassembly. Two U.S. EVAs are penciled in for September in a complex robotic-and-human collaboration to deal with the replacement of the second set of aging Nickel-Hydrogen Batteries with new Li-Ion batteries arriving on the HTV-7 cargo craft. Finally, toward the end of 2018, one U.S. EVA will be needed for the installation of International Docking Adapter 3 to give ISS two docking ports for Commercial Crew traffic.
On the Russian side, EVA operations are highly dependent on the schedule of the long-delayed Nauka Multipurpose Laboratory Module, currently targeting a December 20, 2018 launch. Two Russian EVAs are planned around May and August to complete the setup for the departure of the Pirs module and the arrival of MLM to take its place. After MLM docks, up to three Russian EVAs will come in close succession to complete the external outfitting of the module.

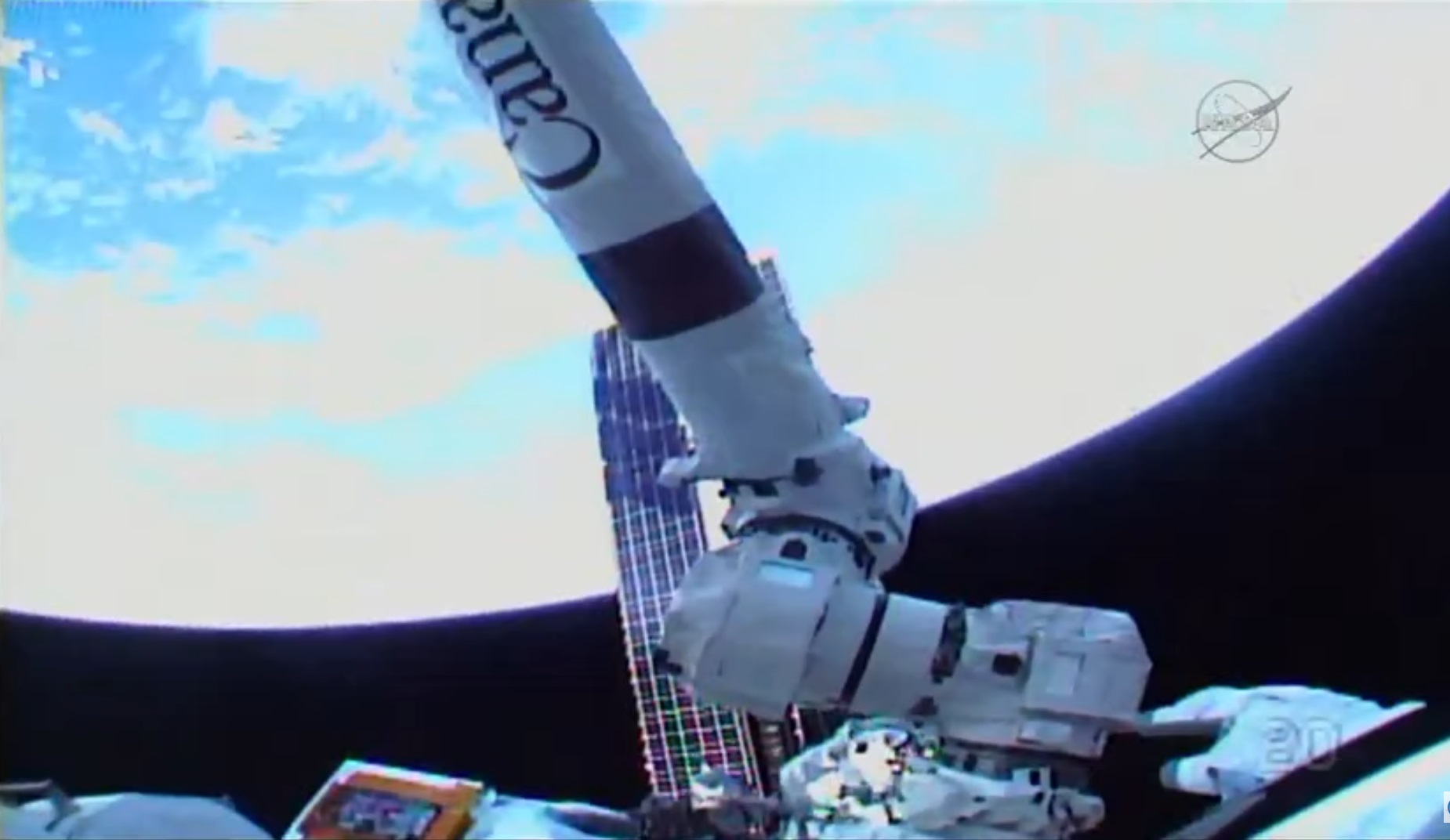
While much outfitting is still to come in 2018, Tuesday’s EVA was tasked with the critical objective of finishing the rejuvenation of the Space Station Remote Manipulator System, also known as Canadarm2. The Canadian-built robotic arm has become a central element of almost all external operations underway on ISS and keeping it in a functional state is a prime priority for the ISS Program as the Station could not function in its current capacity without the arm.
The 17.6-meter long Canadarm2 arrived on ISS in April 2000 and has since taken a number of roles within the Station’s operational repertoire – providing a helping hand during assembly of the ISS by moving large pressurized modules and assembling the Station’s 108.5-meter long Integrated Truss Structure. With ISS taking is operational shape, Canadarm2 began a second career grappling and releasing visiting HTV, Cygnus and Dragon spacecraft, having completed 28 such maneuvers over the last nine years.
Canadarm2 received a robotic companion in 2008 when the two-armed Dextre arrived at ISS to assist with dexterous tasks outside the station. Since then, the Station’s robotic duo steadily expanded its capabilities in performing remote-controlled maintenance and repair tasks outside the Station – saving precious crew time that would have otherwise been needed for spacewalks.
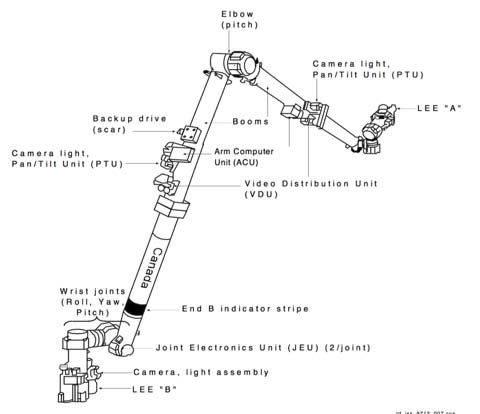
The 1,800-Kilogram Canadarm2 – building on experience from the less-advanced Space Shuttle Robotic Arm – has seven motorized joints to move in seven degrees of freedom, similar to the human arm but with a much greater range of motion. Either end of the arm is outfitted with a Latching End Effector (LEE) that can serve as the base point of the arm or as the free-flying end to manipulate items, also allowing the arm of self-relocate end-over-end between the different Power & Data Grapple Fixtures (PDGFs) on the outside of ISS.
As one of the most complex electro-mechanical systems on the International Space Station, the LEEs hold a multitude of components including cameras and a wealth of force and other sensors, three snares to grasp onto grapple fixtures, and four complex latch assemblies that can form a rigid structural coupling between the arm and a PDGF while also forming electrical & data bridges.

Each of the 200-Kilogram LEEs was designed for a ten-year service life and so it was not a surprise to engineers when the two LEEs that have been on SSRMS since its launch began showing signs of degradation after some 12 years of regular operation.
It was LEE-B that had been earmarked for replacement first and teams were starting work to prepare for the replacement spacewalk last July, but plans had to change in August when LEE-A, which had appeared in better condition, encountered a motor stall and was no longer able to fully use its latches to form an electrical connection with whatever it was grappling. Priority was therefore given to LEE-A and its replacement was completed in October when Randy Bresnik and Mark Vande Hei swapped it with the POA (Payload/Orbital Replacement Units Accommodations) LEE that had only undergone 14 cycles over its 15-year tenure on ISS vs. over 400 on LEE-A.
LEE-B, although in a degraded state per increased motor currents when its moving parts were in motion, continued to support a pair of visiting vehicles in November and December, including a demonstration of the first-ever ground-controlled release of a cargo spacecraft. To fully restore the arm, NASA lined up a pair of spacewalks for late January with EVA-47 tasked with the actual replacement of LEE-B and the next spacewalk dedicated to returning the POA to service by replacing the failed LEE (formerly LEE-A) with what was formerly LEE-B which is considered in good-enough condition to support POA duties for the remainder of its life.
Third-time EVA crew member Mark Vande Hei, serving as the lead spacewalker for both January EVAs, and first-time spacewalker Scott Tingle moved through a multi-hour EVA preparations process after getting up early on Tuesday, assisted by USOS crew members Joe Acaba and Norishige Kanai. The team made quick work leading up to the start of the EVA at 11:49 UTC, around twenty minutes ahead of the day’s timeline.
Prior to the crew departing the Quest Airlock, Mark Vande Hei had to complete a cold re-start of his space suit after his Display & Control Module suffered a lock-up that left him without insight into suit data. Once this issue was overcome, the two spacewalkers quickly egressed and went through their tether configuration before heading over to External Stowage Platform 2, the main work site of Tuesday’s excursion.

The first order of business for the spacewalkers was the setup of a pair of Articulating Portable Foot Restraints on ESP-2 before they got started with a lengthy preparation task on the spare Latching End Effector (S/N 204). This particular LEE was delivered as an external spare by the STS-129 mission in 2009 and was relocated from Express Logistics Carrier 1 to ESP-2 last year to be in an easily accessible position by spacewalking crew members.
To prepare the spare for installation, the spacewalkers first removed a pair of Multilayer Insulation blankets and opened four launch locks, each by releasing a pair of bolts and manually releasing a handle – allowing the LEE to be rotated into an upright position. This allowed access to the LEE-support ring interface where the LEE was attached via six Expandable Diameter Fasteners, the first three of which were released by the crew to set up for the removal later on in the EVA.
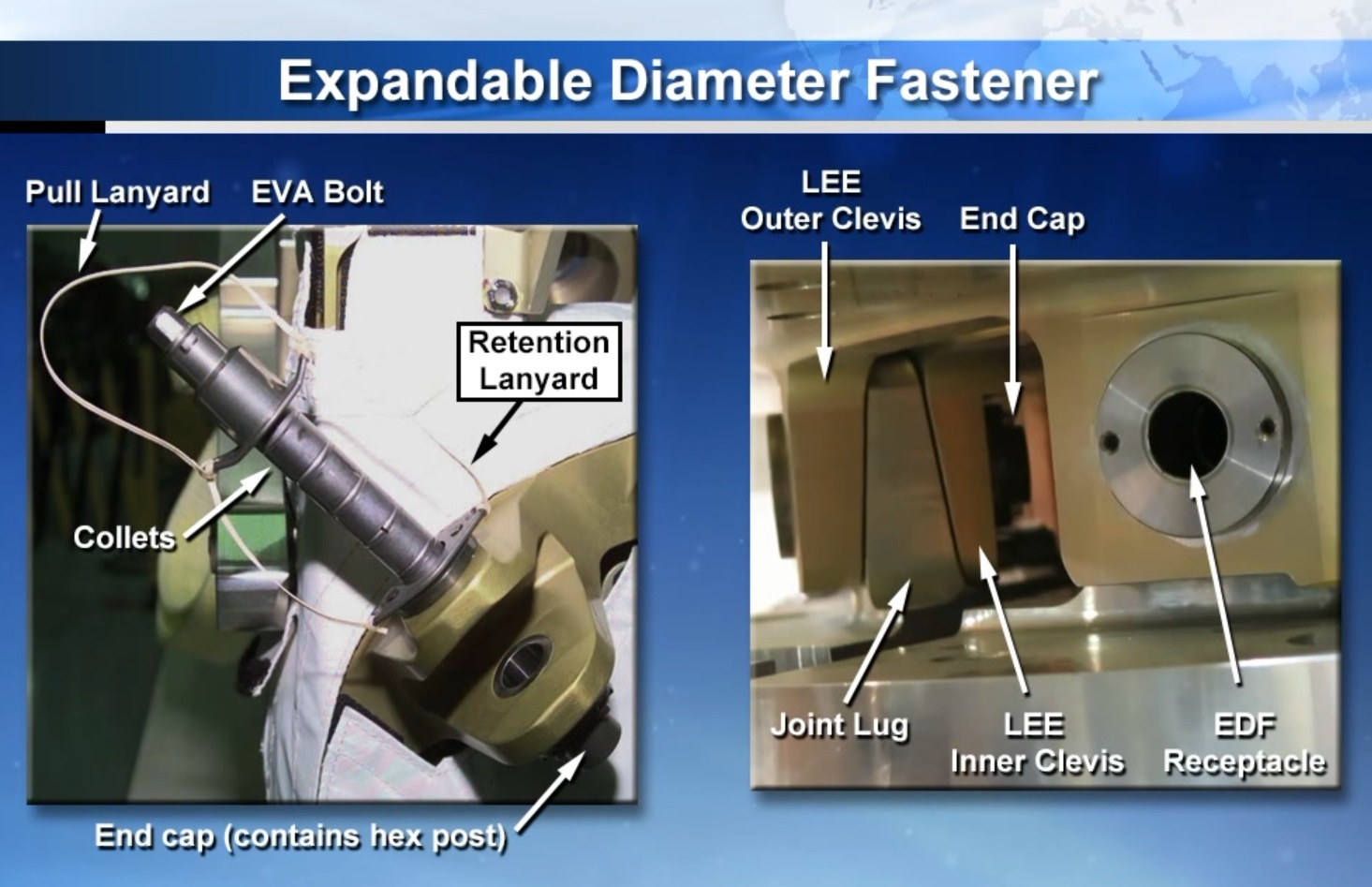
The Expandable Diameter Fasteners (EDFs) were the recurring theme of Tuesday’s EVA, employed on the robotic arm and its grapple fixtures due to the high-load environments arising when moving massive components.
As their name suggests, the EDFs will change in diameter when being driven by pushing out collets in order to form a friction fit with very high stiffness and zero tolerance. To guarantee a stable interface, the EDFs are driven to torque using the Pistol Grip Tool followed by one or more re-triggers at a higher torque setting to ensure no tolerance exists within the structure – creating a lengthy process when dealing with a total of 22 separate bolt cycles during an EVA as was the case on Tuesday.

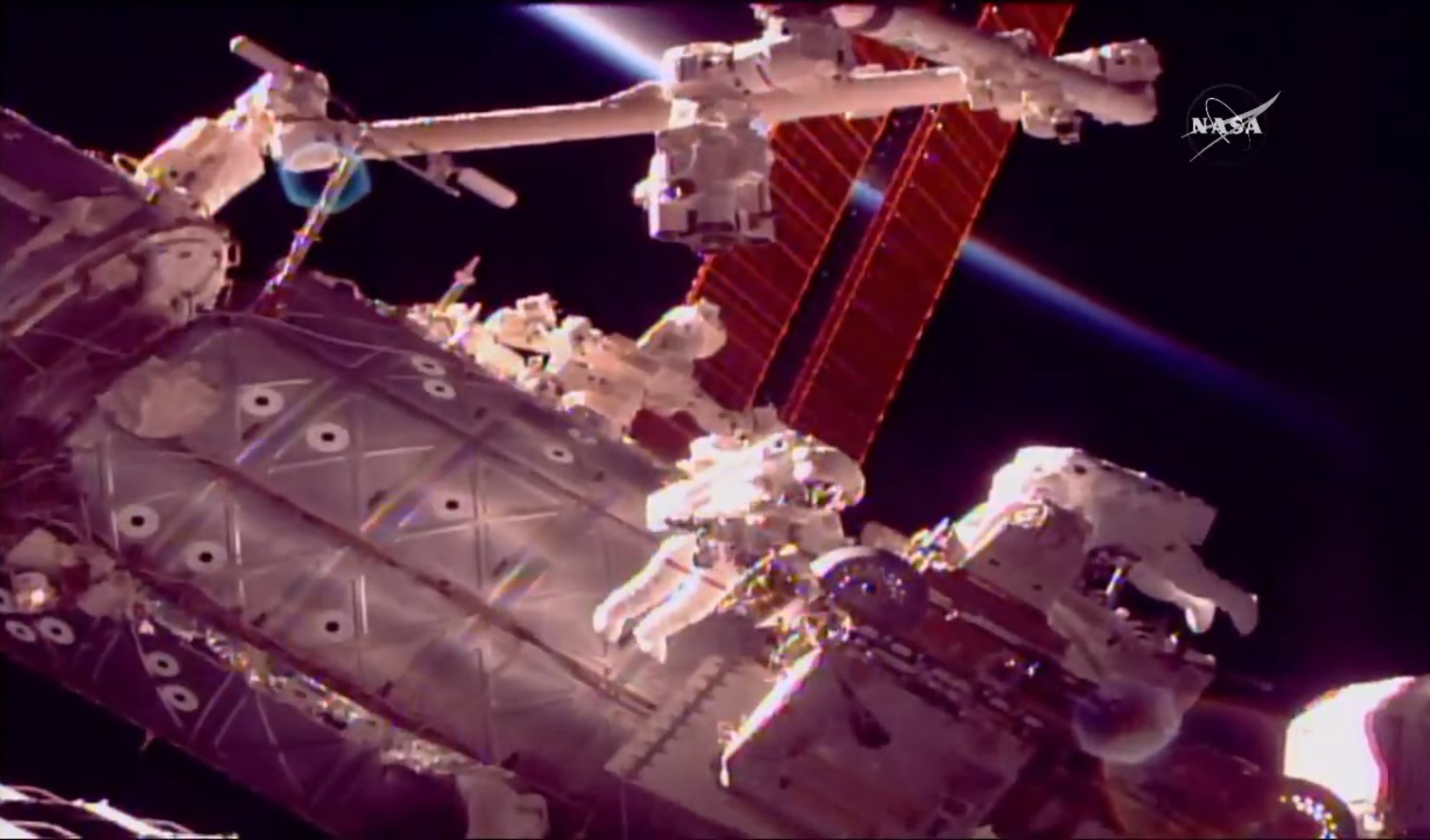
Once the spare LEE was prepared, the two spacewalkers ingressed their foot restraints to have both hands free when working on the arm’s LEE-B. Guided by the spacewalkers, Japanese crew member Norishige Kanai maneuvered the LEE into position between Vande Hei and Tingle. They then removed an insulation blanket to reveal the EDF ring that joins the LEE to the Wrist and released the first two fasteners. Via wrist rotation, the LEE was re-positioned for the two spacewalkers to access the remaining set of EDF bolts and Canadarm2 was then powered down to safe it for the removal of the LEE.
After the final EDF bolt was released, Vande Hei took control of the 190-Kilogram LEE while Tingle physically rotated Vande Hei’s foot restraint to move him toward the temp-stow location on a support ring on the spare LEE’s Flight Support Equipment. Four of six EDFs were re-engaged to secure the LEE on ESP-2 where it will remain until being retrieved during the January 29 EVA by Vande Hei and Kanai.
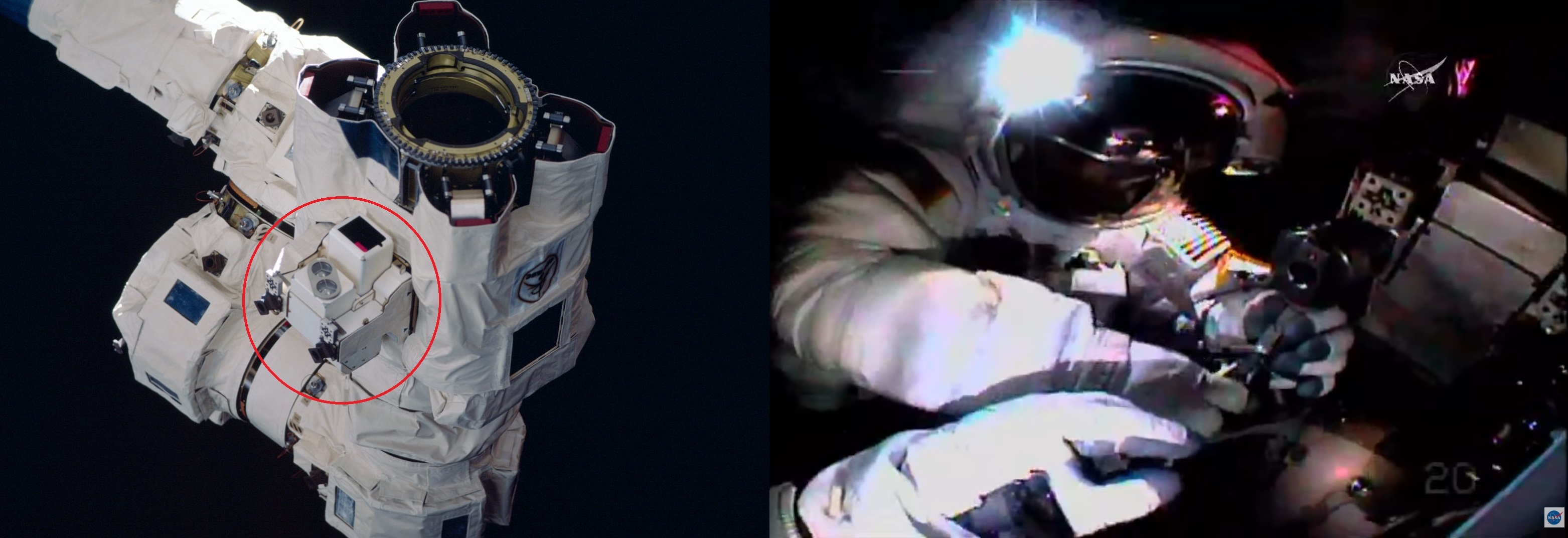
With the two LEEs sitting side by side on ESP-2, the two spacewalkers again put their Pistol Grip Tools to use, removing a Camera & Light Assembly (CLA) from the degraded LEE via two Micro-Fixtures and auto-mate connectors. The 16-Kilogram CLA was then installed on the spare LEE #204 that launched without a camera – again highlighting the interchangeability of the various components of the Mobile Servicing System, ranging from small items like lights and cameras to entire robotic arm joints and, of course, the end effectors.

Vande Hei was again tasked with handling the Latching End Effector while Tingle released the three remaining EDF bolts to free up the LEE from its Flight Support Equipment. Holding onto the LEE, Vande Hei returned to Canadarm2 as Tingle rotated EV-1’s foot restraint to its original position. Installation of the new LEE-B was a lengthy process as the spacewalkers struggled with access to all six EDF bolts to push them into the LEE-Wrist interface to complete the required soft-docking before the bolts could be driven to torque.
After managing a successful soft-dock by manually starting all the bolts, the spacewalkers tightened four EDFs with the Pistol Grip Tools followed by the LEE Mate-Demate Mechanism to allow the SSRMS to be re-powered.
Upon powering up the arm, ROBO controllers at Mission Control encountered a State Command Error when attempting to communicate with the newly-installed LEE – essentially not getting a response from the LEE. As part of troubleshooting steps, the crew was instructed to cycle the LEE Mate-Demate Mechanism which drives the electrical and data connectors in the back of the LEE to engage with interfaces on the arm’s wrist joint.
Mission Controllers were able to confirm fairly quickly that the recycle did the trick and LEE-B was appearing to be in excellent condition after spending over eight years outside the Space Station; however, more detailed checkout and characterization of its moving parts and associated sensors will be completed in the coming days when the LEE will complete its first grapple maneuver in space.
Re-powering the SSRMS enabled Kanai to provide wrist roll maneuvers as needed by the spacewalkers to tighten the remaining bolts and then make a second pass on all six to verify proper torquing. Given the EVA had drifted well over an hour behind the timeline, the crew and Mission Control decided to close out the excursion without moving into get-ahead work, having checked off the major objective of EVA-47.
U.S. EVA-47 ended at 19:13 UTC after an elapsed time of seven hours and 24 minutes. Mark Vande Hei now has three career EVAs under his belt for a total of 20 hours and 45 minutes while Tingle stands at one EVA. The 206 spacewalks in support of ISS Assembly and Maintenance have accumulated a total duration of 1,286 hours.

As EVA-47 checked off its primary objective, the path is clear for the next spacewalk planned on Monday, January 29 by Vande Hei and Kanai whose job it will be to remove LEE 202 (the former LEE-A) from the POA (Payload/Orbital Replacement Unit Accommodations) and installing LEE 201 (the former LEE-B) as the new POA LEE.
The non-functional LEE-A will be taken inside ISS for return to Earth aboard an upcoming Dragon mission for refurbishment while LEE 201 is considered to be fit for the task as POA LEE, only seeing very little activity in terms of grapple operations. The current ground spare LEE is being readied to be shipped to ISS later this year by a Dragon mission as external cargo to be staged outside ISS to ensure there is at least one good LEE spare on board.
