
Robotic Refueling Mission

The Robotic Refueling Mission is an effort by NASA and the Canadian Space Agency to demonstrate robotic Satellite Servicing Capabilities in a Space Environment. RRM is a small module that is attached to the International Space Station and holds equipment necessary for several tasks that are needed to practice servicing operations in space using the Canadian Dextre Robot and special tools that are part of the RRM Payload. This is the first time the Dextre Robot is used for technology research and development. The tests will be performed over a two year duration with first demonstrations in March 2012. As part of RRM Operations, Dextre will complete a list of tasks and repeat those after engineers evaluated previous runs. The crew of the Space Station is not involved in the operation as all aspects of RRM are controlled by Control Centers on the ground. RRM operations are planned to be completed by the end of 2015.

The Payload was delivered to the Space Station on the final Space Shuttle Mission STS-135 during which it was placed at a temporary location. In August 2011, RRM was relocated to its final location.
Before launching, satellites are fueled through a valve that is triple sealed after fueling is complete. Afterwards, it is covered with thermal blankets. Typical satellites are designed to never open the valve again. Removing those barriers are crucial for future satellite refuelings in space. The Robotic Refueling Mission is an experiment that demonstrates that a remote-controlled robot can remove these barriers and perform satellite refueling. RRM is located on ExPRESS Logistics Carrier 4 on the external of the International Space Station.
RRM Hardware and Tools

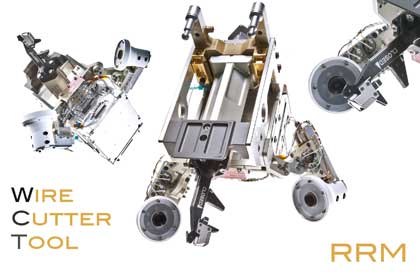
Four different tools are part of the RRM Mission that are being used to demonstrate the steps necessary to perform a re-fueling procedure of a satellite in space. The four tools are located on the RRM Module and can be attached to the Dextre Robot. Each tool includes cameras that enable ground controllers to monitor operations in real time. LEDs provide illumination for operations during orbital night.
The RRM structure contains representative satellite fueling interfaces (common interfaces found on a variety of satellites) including a fluid transfer system. The Robotic Refueling Mission Module is about the size of a washing machine weighing about 250 Kilograms. It is 84X109x114 Centimeters in size. 1.7 liters of Ethanol are in its tank to simulate satellite fueling by transferring the liquid. The module includes protective thermal blankets, caps, valves, simulated fuel, and other servicing-related spacecraft components.
A Wire Cutter Tool severs safety wires that are attached to the fuel cap of most satellites. It is also used to remove thermal blankets that are covering the fuel cap area. A spade bit on the tool’s tip can slice blanket tape. Parallel Jaw Grippers can grab a satellite’s appendages. After removing tapes that secure fuel cap insulation blankets and cutting safety wires, fuel or gas caps can be removed. For that, a different tool is needed. The Multifunction Tool is capable of performing the work of four different tools. It connects to four adapters to capture and remove remove three distinct caps and remove one gas “plug” on the RRM module.
he Safety Cap Tool removes and stows the Fuel Cap and associated seals. Small adapters on the Tool allow it to manipulate screws and remove caps on the RRM module. The actual refueling operation is accomplished with the Nozzle Tool which connects to, opens and closes the satellite’s fuel valve. A hose attached to the tool transfers the fuel in a continuous loop to simulate the refueling of a satellite. After the operation is complete, a fuel cap is installed on the simulated satellite. This cap is outfitted with a QD – Quick Disconnect – that provides easy access to the main fuel valve for future refueling operations. The Robotic Refueling Mission Payload is capable of demonstrating six individual refueling operations.
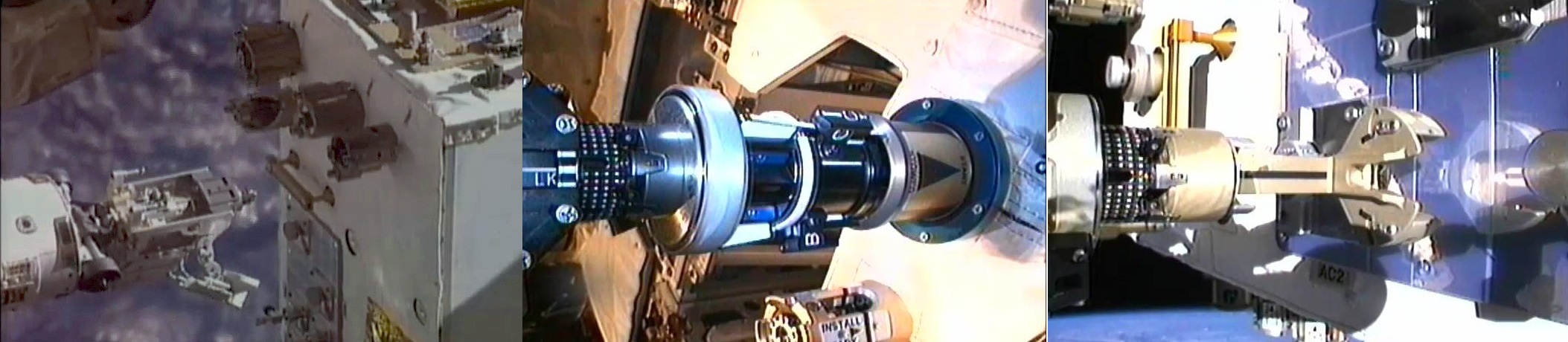
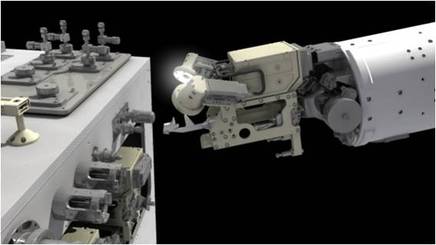
RRM Tools in Use
RRM Tasks


Launch Lock Removal and Vision Checks
The first task of RRM that was completed once it was installed at its final location was to release the launch locks that kept the four tools in place during ascent aboard Space Shuttle Atlantis. The Dextre Robot was used to release the locks. The operations were completed successfully and teams started checking the entire payload by using Dextre’s Cameras. Imagery was acquired during day and night passes providing data that NASA’s Satellite Servicing Capabilities Office used to develop machine vision algorithms that work against harsh on-orbit lighting. These operations were completed in September 2011 and mark the only RRM Procedures that do not include actual RRM Tools.
Gas Fitting Removal
Dextre used RRM Tools to remove the fittings that many satellites have for the filling of special coolant gases. Before starting the task, the Robot captured three of the RRM Tools and performed functional checkouts prior to starting actual operations. Afterwards, more launch locks were removed to put the RRM Module in operating configuration. Using the Wire Cutter, Dextre cut the lock wire that every satellite has on its fuel cap. This task demonstrated that even small wires can be located and cut by using current robotic technology. Following the removal of the actual fuel cap, actual refueling would begin. The Gas Fitting Removal Task was completed in March 2012 and June 2012.
Refueling
After opening a fuel valve that is similar to those installed on satellites orbiting Earth, a simulated fuel is transferred through a robotic fueling hose. The liquid that is transferred is Ethanol. RRM will not run out of fuel as it is flowing through a closed loop for the purposes of testing and not actually filling fuel from one tank into another.
Thermal Blanket Manipulation
Using RRM Tools, Dextre cuts tape that secures thermal blankets to enable it to fold the insulation material in order to reveal the contents underneath. This is needed as many satellites have thermal blankets covering the areas that have to be accessed in order to perform servicing operations.
Fastener Removal
Dextre captures RRM Tools and unscrews satellite bolts that are used on many satellites to hold covers in place that protect electrical and other systems.
Electrical Cap Removal
To remove electrical covers satellites employ to protect electrical equipment on board, Dextre uses RRM Tools to demonstrate the removal procedure.
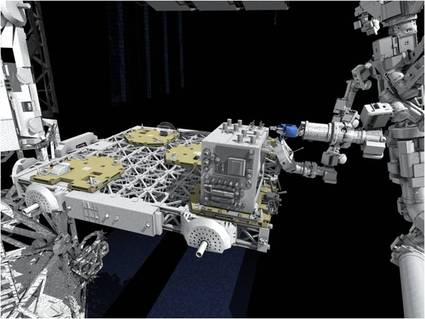
The ELC-4 is clearly visible as the structure RRM is mounted on. Dextre is based on the Canadarm 2 for this test. – Image Credit: NASA
The ELC-4 is clearly visible as the structure RRM is mounted on. Dextre is based on the Canadarm 2 for this test. – Image Credit: NASA
Applications
“Every satellite has a lifespan and eventual retirement date, determined by the reliability of its components and how much fuel it can carry,” explains Benjamin Reed, deputy project manager of NASA’s Satellite Servicing Capabilities Office, or SSCO.
Robotic Refueling could extend satellite on-orbit lifetime as fuel consumption is a constraint for many ongoing missions. Satellite Replacement Cost would be decreased dramatically as spacecraft could remain active in orbit for several years exceeding their initial lifetime. With a fueling capability in space, satellites could be launched with a reduced amount of fuel – thus freeing up launch mass for Payload Equipment leading to more advanced spacecraft. Eventually, manned vehicles could be refueled in Earth orbit and then use the new fuel to reach more distant goals in space. By performing RRM aboard the ISS, the risk associated with a free flying mission is eliminated as the foundation for a future robotic servicing mission to a free-flying satellite is built. In addition to that, Space Robotics can be advanced for a variety of applications in the future of Space Exploration.
