HDEV – High Definition Earth Viewing Payload
The International Space Station has been serving as a host facility for a large number of Earth observation payloads that share the station’s accommodations such as its electrical power system, data downlink capability and attitude stability. Part of the suite of observation payloads to be installed on ISS is HDEV – the High Definition Earth Viewing Payload. HDEV consists of four commercially available cameras that will be evaluated for use in the Low Earth Orbit Environment and in the process provide HD views of Earth that will be used by scientists for various applications and will be released to the public via an online live streaming platform.
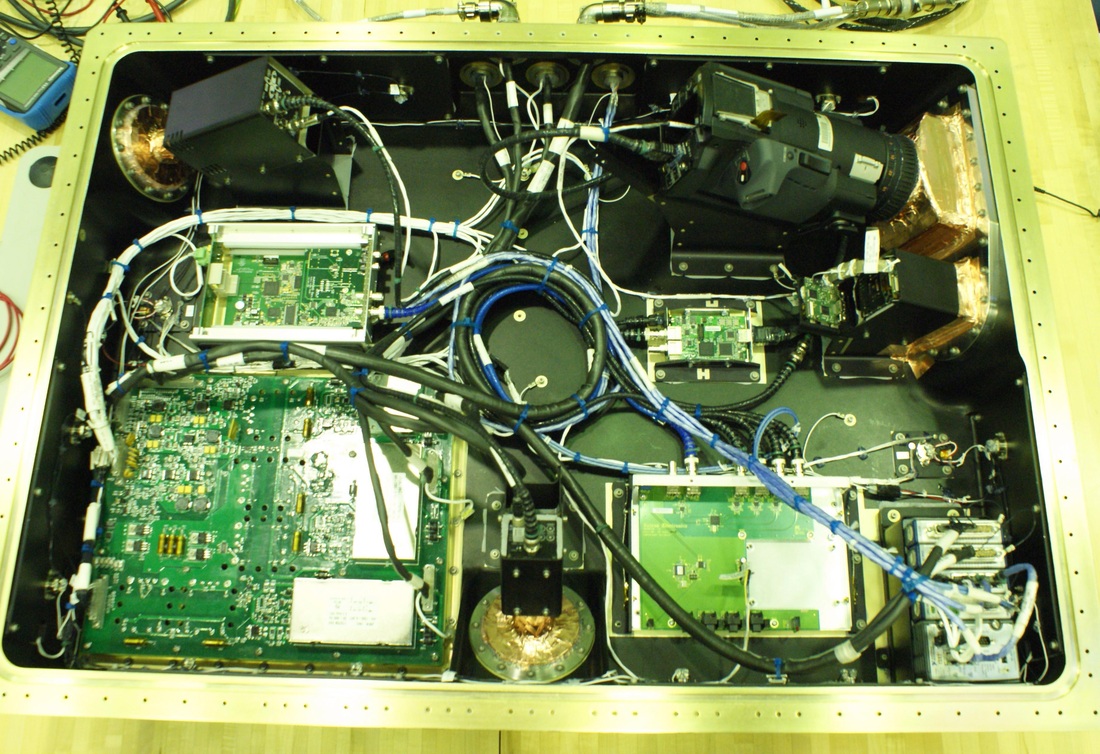
The HDEV payload uses COTS – Commercial of the Shelf hardware and consists of an attachment system, an HDEV housing, four cameras, one router and encoder as well as power and data interface equipment. The payload uses the FRAM – Flight Releasable Attachment Mechanism for attachment inside Dragons Trunk, detachment and handling via the Dextre Robot and installation to its operational location on the Columbus module of ISS.
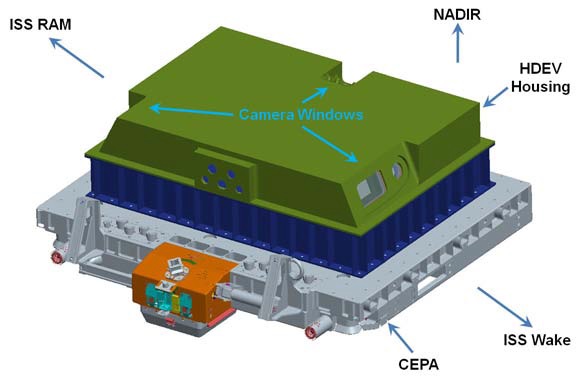
All HDEV Hardware is enclosed in the housing of the instrument containing dry Nitrogen at atmospheric pressure, allowing components that are not certified for use in vacuum to be utilized. High quality camera windows are used in the enclosure. The four cameras do not have any pan/tilt capability, each camera has a fixed field of view and the four cameras are mounted so that one points forward, one points nadir and two are oriented to the wake/aft side.
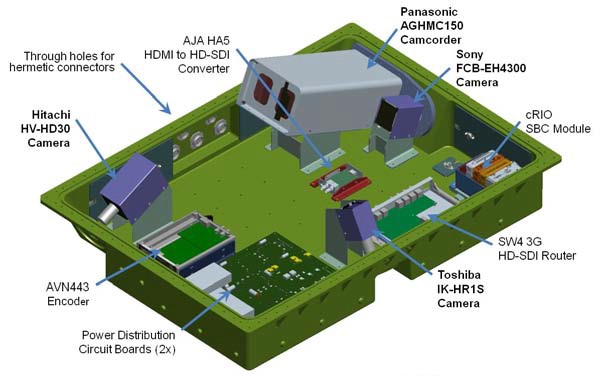
The forward facing camera is a Hitachi GV-HD30, the nadir pointing camera is a Toshiba IK-HR1s and the two aft facing cameras are a Sony FCB-EH4300 and a Panasonic AGHMC150. All cameras have a fixed zoom and do not require any complex commanding.
HDEV uses an AJA HA5 HDMI to HD-SDI converter, an cRIO SBC module an Extron SW4 3G HD-SDI router and a Visionary Solutions AVN443 encoder to process the video for transfer to ISS and downlink via the ISS Communications System. Two power distribution boards condition the instrument power bus that routes power to the cameras and electronics. Onboard recording capability does not exist – downlink is provided in real time only and recording has to be implemented on the ground to save onboard resources. Connectivity to ISS power and data systems is provided via hermetic connectors that automatically engage when the FRAM is attached to its installation location on Columbus.
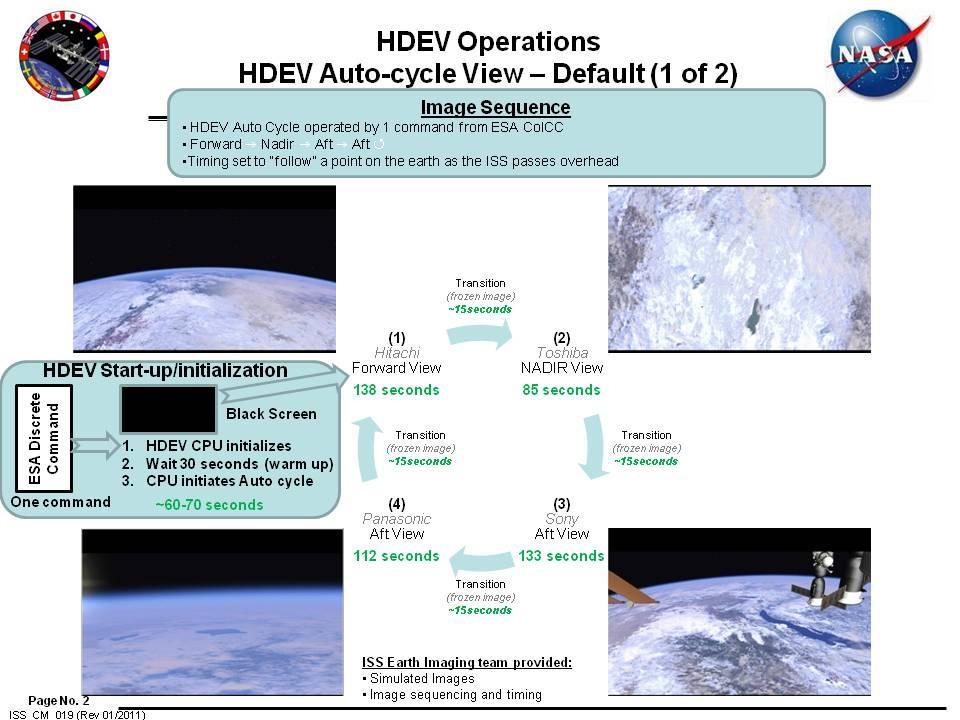
The operation of the instrument is fairly simple in its automated mode. After the initial power-up command is sent from the Columbus Control Center in Germany, the HDEV payload warms up for 1-2 minutes before an auto cycle is started. In its auto cycle, the HDEV payload follows a target on Earth by starting with a forward view before autonomously switching to the nadir view and then transitioning to the aft view as the target passes underneath and behind ISS. The forward view is on for 138 seconds before a 15-second transition to the nadir view that is kept for 85 seconds.
After another 15-second transition, the Sony aft camera is selected for 133 seconds before switching to the Panasonic aft camera for 112 seconds.
In manual mode, individual views can be selected as desired so that targets of opportunity can be observed.
The main objective of the HDEV payload is to evaluate the performance of the cameras in the space environment over an extended period of time. This is accomplished by recording sequences at defined intervals and assessing the degradation of image quality over time as a result of the increased radiation dose in Low Earth Orbit. Signs of degradation caused by radiation could be hot pixels or failing electronics. This will help in selecting commercial components for future space missions.
HDEV Auto Sequence