
CanX-7

CanX-7 is a deorbiting nanosatellite demonstration operated by the University of Toronto Institute for Aerospace Studies/Space Flight Laboratory as a direct response to the growing importance of space debris mitigation techniques for Low Earth Orbit missions.
The primary objective of the CanX-7 mission is the demonstration of a large drag sail that can be added to the outside of a satellite platform and therefore eliminates any interference with internal systems. The satellite also carries an aeronautical tracking system for a demonstration.
The deorbitation of microsatellites is a challenging issue given the mass and volume limitations imposed on them as well as their short in-orbit lifetime which essentially eliminates any D/O technologies that require the satellite to remain active through the process.
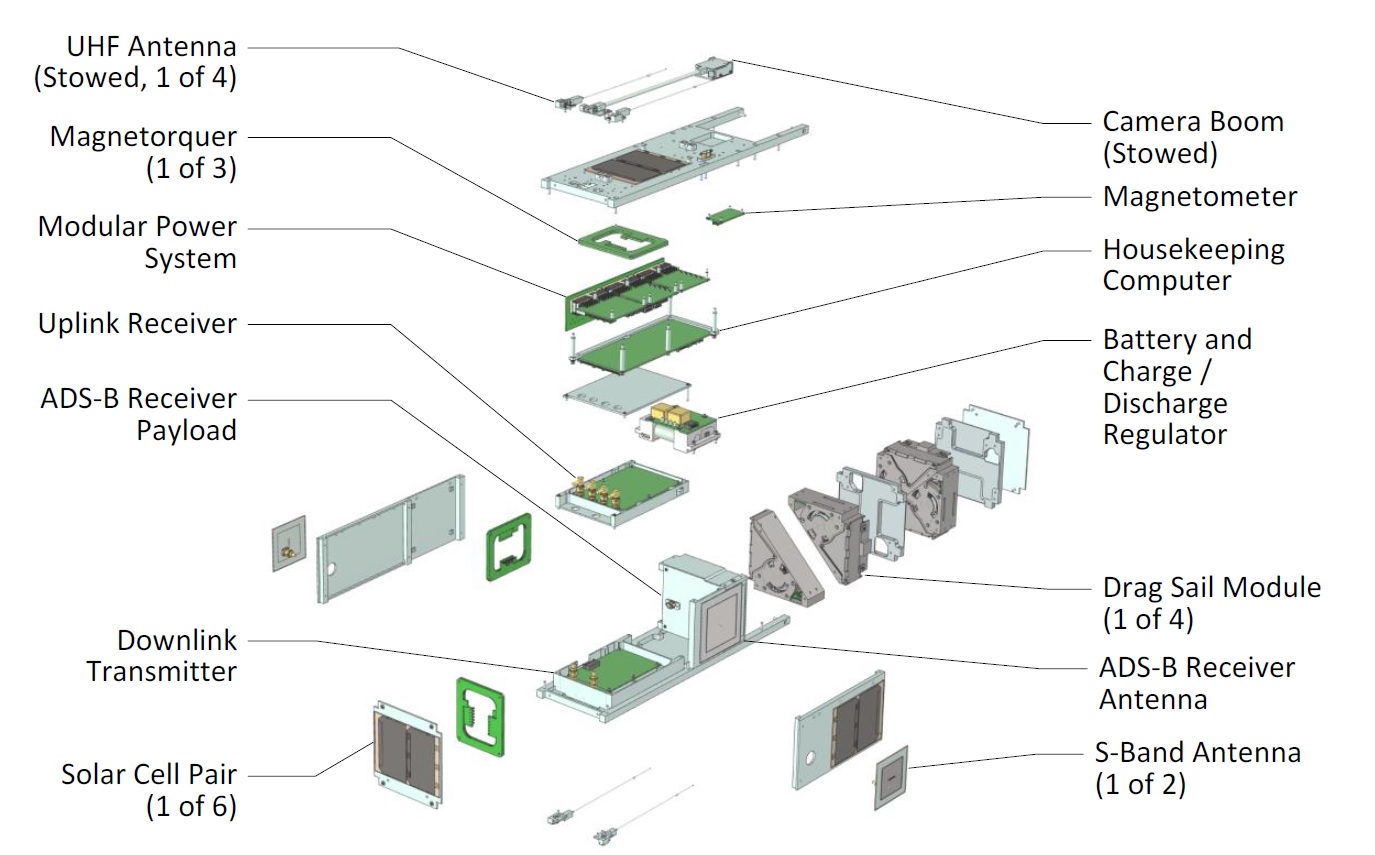
CanX-7 makes use of a flight-proven three-Unit CubeSat platform, leveraging electronics in use on the Generic Nanosatellite Bus that has flown a number of previous CanX missions. The satellite has a launch mass of 3.75 Kilograms.
The CubeSat employs a Direct Energy Transfer power system with eight body-mounted triple-junction solar strings feeding a 4.8 Amp-hour Li-Ion battery. CanX-7 requires an average power of 3 Watts peaking at 5W with all loads connected to a 4.2V power bus controlled by a Power Distribution Unit.


The satellite relies on a purely magnetic Attitude Determination and Control System built around a three-axis magnetometer for attitude determination and three orthogonally printed magneto-torquers that are in charge of de-tumbling the satellite after launch and placing it in a favorable orientation prior to sail deployment to guarantee the best possible communications.
The onboard data handling and control system is centered around a central processing system featuring a ARM7/TDMI processor that handles standard telemetry and communications, command execution, attitude control and payload actuation. CanX-7 features four monopole antennas to provide omni-directional coverage for UHF command uplink at a 4kbit/s data rate.
A pair of S-Band patch antennas are used for data downlink at near omnidirectional coverage at data rates between 32 kbit/s and 1 Mbit/s. The satellite hosts a mass memory of 1GB that stores housekeeping data and imagery collected by the sail deployment camera.
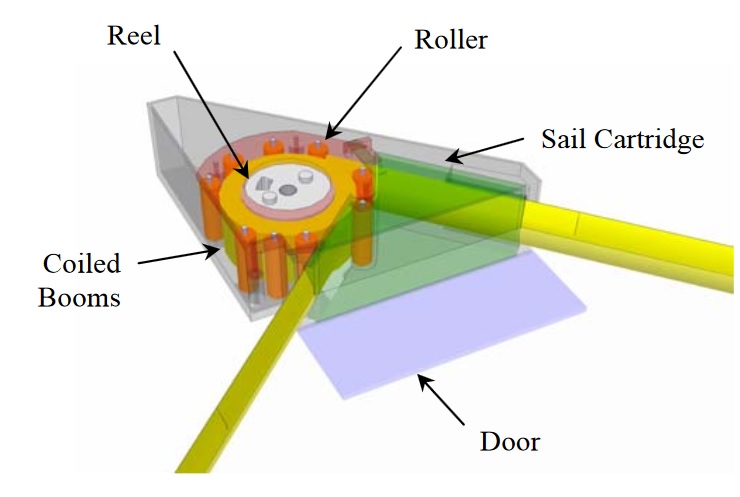
The Drag Sail makes use of a modular design, featuring four individual sail modules which form a subsassembly that fits within the 3U satellite bus using a pair of interface brackets for the structural connection. Each module can be commanded individually and consists of a roller assembly, drive electronics, housing, a reel assembly, release mechanism and cartridge assembly.

The Drag Sail Electronics are responsible for several tasks: processing deployment commands, stepping the actuators through the deployment sequence, and collecting telemetry on the progress of the deployment. The electronics interface with the spacecraft through a power bus, a telemetry bus and a command bus from the UHF receiver.
Each Drag Sail Module houses a microcontroller interfacing with the spacecraft data bus and the UHF receiver to directly receive the ARM and FIRE commands for deployment. Also part of the system is a driver circuit to monitor and activate the release system heater, a microswitch to provide confirmation whether the sail door is open and a hall effect sensor which tracks the motion of the boom reel.
The deployment mechanism employed by CanX-7 utilizes the principle of stored mechanical energy instead of opting for a less-reliable electrically driven deployment – a pair of tape springs is unwound from a reel inside a circular enclosure that converts the uncoiling motion of the tape springs into linear motion away from the spacecraft. The triangular sail segment is secured at the tips of the two booms and inside its Drag Sail Module.
The sail material in use for CanX-7 is a metalized polymer. Metalization is required to protect the polymer material from atomic oxygen and UV radiation which would quickly cause the material to become brittle and ineffective. Theoretically, transparent films of under 7 micrometers in thickness would be the desired material for the sail, but are not readily available due to regulatory challenges. Therefore, the material chosen for CanX-7 was a readily available 12.7-micrometer Kapton film with a 300-Angstrom aluminum coating which is capable of handling worst case temperatures in excess of 200°C.

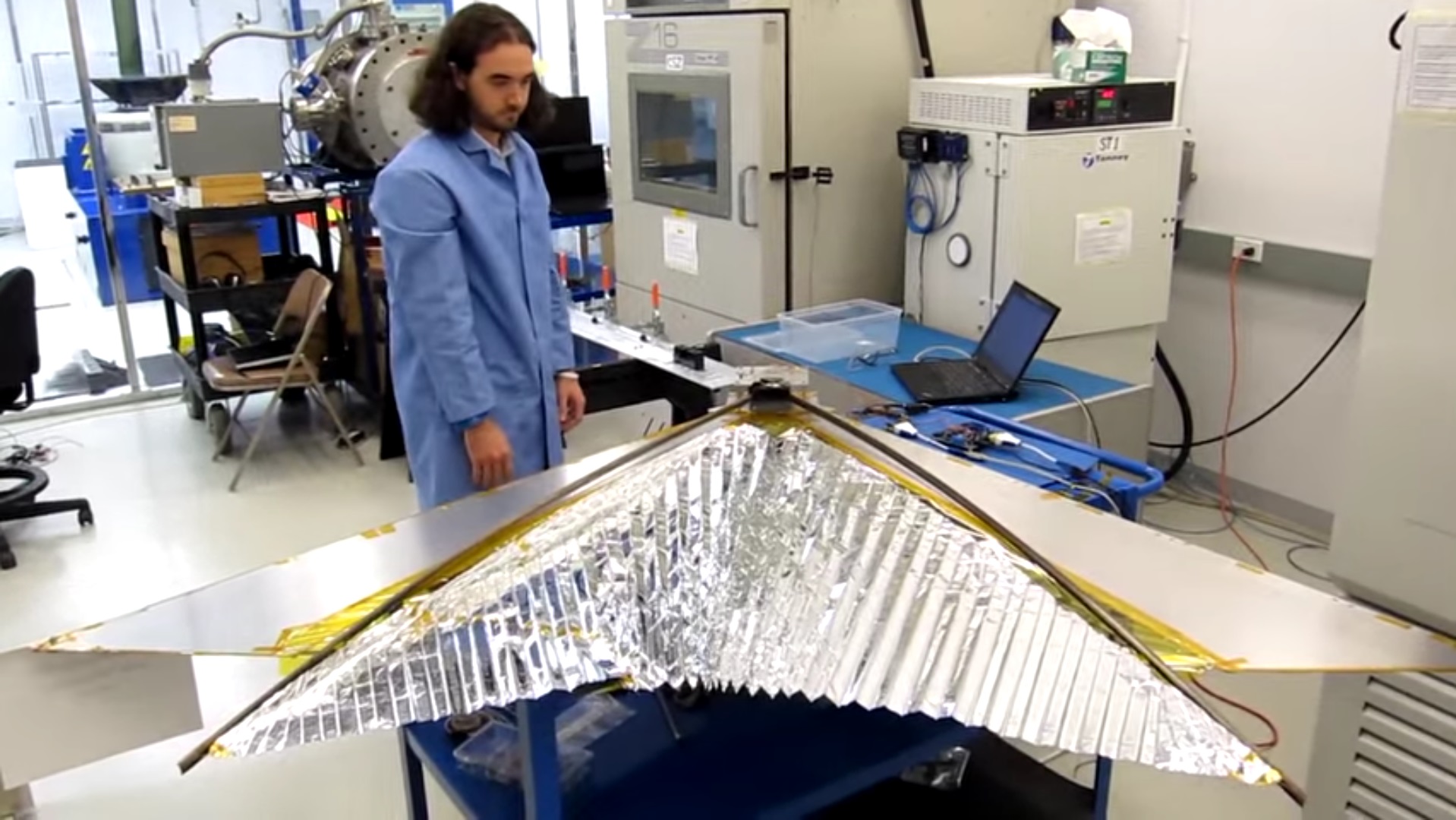
The sail is stowed in a cartridge that can be removed and replaced after ground test deployments. A door holds the sail secure during launch and resists the force of the spring-loaded booms until deployment starts with the opening of the door. Folding of the sail is accomplished in an accordion-like Z-pattern in two perpendicular directions to match the layout of the sail cartridge.
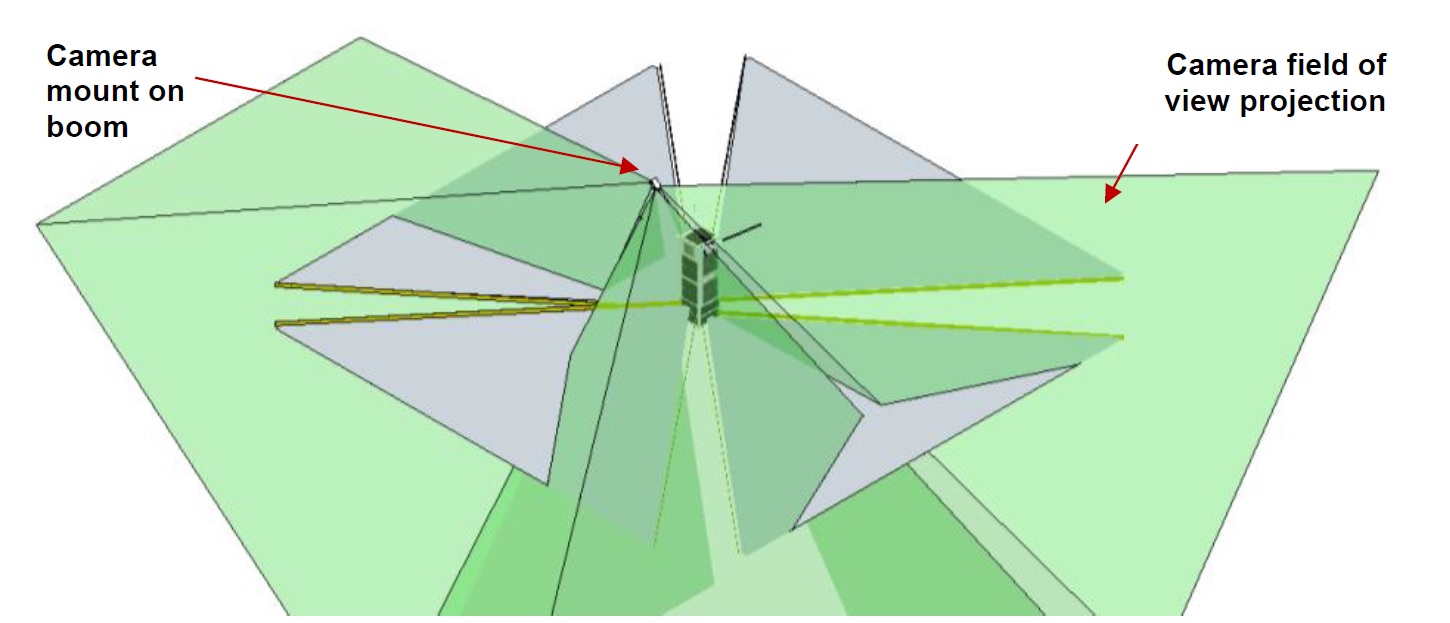
Deployment of the sail can be fully assessed via telemetry from the deployment sensors, though a visual inspection of the status of the sail is highly desirable. Therefore, CanX-7 carries a Drag Sail Inspection Camera comprised of three optical imagers on a deployable boom to be able to obtain photos of all four sail segments.
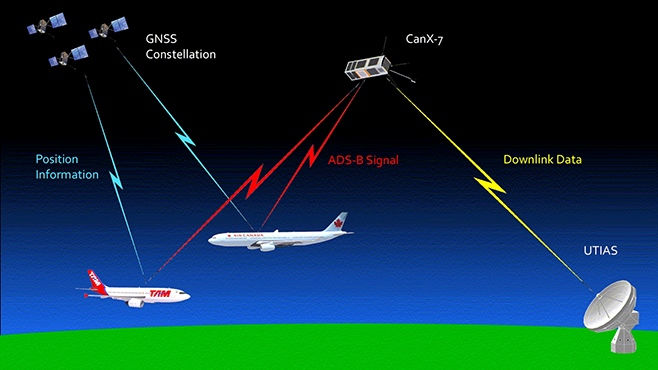
CanX-7 carries a secondary payload dedicated to the collection of ADS-B signals – Automatic Dependent Surveillance – Broadcast signals from commercial aircraft. These signals represent periodic transmissions of data by an aircraft’s Mode-S transponder at the 1090MHz frequency, containing the aircraft ID, its position, altitude and intent.
These signals are used by air traffic control for areas in which a ground receiving architecture is present, but given the short range of the ADS-B signals, they are not useful over land areas with poor infrastructure and oceanic coverage is very limited.
Nevertheless, ADS-B has become a significant part of air traffic control, being used in the same manner as information provided by radars. ADS-B will become mandatory for all aircraft in the near future and there is a strong desire to ultimately phase out the traditional radars and purely rely on ADS-B since the receivers are much easier to maintain.
Given the short range (80 Nautical Miles) of ADS-B, there were some doubts as to whether the signals could be received from orbit – a necessity in the overall goal of establishing global ADS-B coverage. Previous missions have shown that ADS-B reception by LEO satellites is not an issue, prompting further research in the area.
The ADS-B receiver on CanX-7 was provided by COM DEV and will operate for six months before the drag sail is deployed.