LightSail-A Satellite Overview
LightSail-A is a 3-Unit CubeSat developed and operated by The Planetary Society to demonstrate sunlight, or rather solar pressure, as a means of spacecraft propulsion for potential future use in large sails for deep space propulsion. The LightSail-A mission will only function as a demonstration of the mechanical systems used in the deployment of the sail and validate the satellite bus for a longer test mission in a higher orbit in 2016 to actually demonstrate spacecraft acceleration through solar pressure.
The Planetary Society and its partners attempted to send a first solar sail mission, Cosmos 1, into orbit in June 2005, but the submarine-launched Volna rocket failed to deliver the spacecraft to orbit.
In 2009, The Planetary Society took over control of NASA’s NanoSail-D project that had encountered a launch failure the year before when its Falcon 1 launcher ran into problems during stage separation. A replacement, NanoSail-D2, was launched in 2010, but experienced trouble during its deployment from the FASTSAT spacecraft that was delayed by over a month. Deployment of the sail was confirmed via ground-based observations and the satellite re-entered in September of 2011.
The LightSail project was announced by the Planetary Society in November 2009 and is technically much more ambitious than NanoSail, aiming for two test flights – the first to a low, short-lived orbit to demonstrate the mechanics of the sail deployment and the subsystems of the satellite; and the second to a higher orbit where drag is no longer a factor and solar-pressure propulsion can actually be demonstrated and quantified. Unlike NanoSail, the LightSail spacecraft has a precise attitude control system which will allow it to maintain a commanded orientation relative to the sun to generate a targeted thrust force for measurements. Furthermore, LightSail has a lower mass-to-area ratio to increase the effect of solar propulsion.
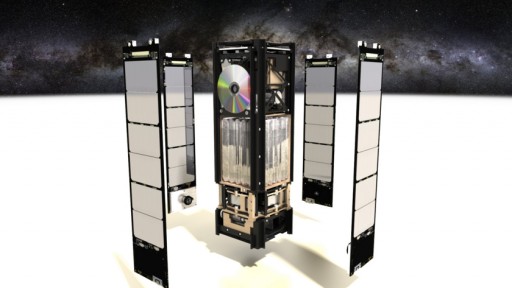
The LightSail-A spacecraft uses the 3U CubeSat form factor measuring 34 by 10 by 10 centimeters in size with a total mass of around five Kilograms. Two of the CubeSat Units are occupied by the stowed sail and its deployment system while the remaining Unit hosts the various satellite support systems. The satellite was built by Stellar Exploration Inc. and the platform is a design provided by CalPoly.
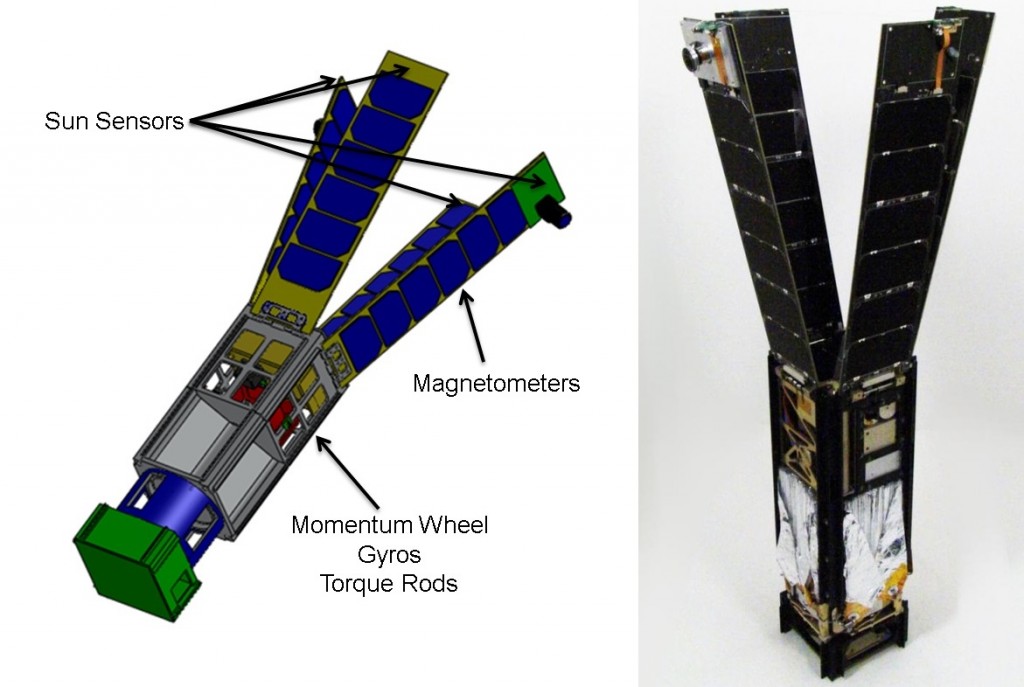
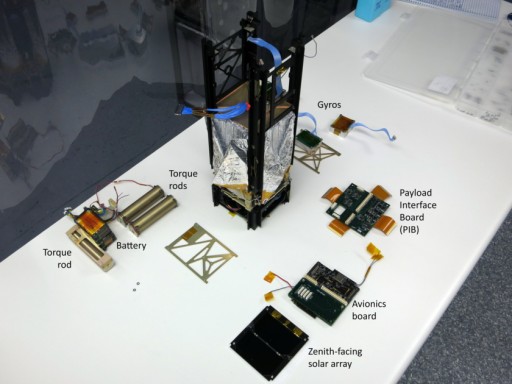
The satellite consists of a 1U avionics section that houses the main avionics board, the sensor interface board, a transceiver, the battery assembly, torque rods, momentum bias wheel, three gyros, and accelerometer. The sail module is about 1.5U in size and facilitates the sail storage cavity and the boom deployer. The payload section occupies the 0.5U in the aft of the satellite facilitating the deployer spindle drive motor and gear train, an accelerometer, a monopole antenna and a burn wire mechanism.
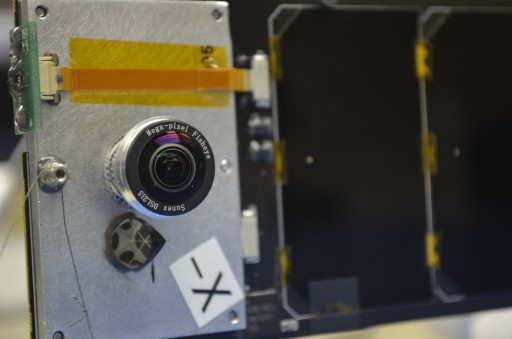
Power generation is accomplished by ten solar panels – two on the top and bottom panels of the satellite and four double-sided deployable solar panels that deploy from the larger side panels of the satellite, covering up the sail and deployment system when the satellite is in the stowed configuration. The four panels are hinged on one side and held shut by a spectraline that runs through a Nickel-Chromium Burn wire that cuts the spectraline when deployment of the panels is commanded about 28 days after launch. Power is stored in eight Lithium Polymer batteries, regulated by a battery control board. Two 2Mpixel cameras are installed at the end of two of the solar panels using fish-eye lenses to be able to document the deployment of the solar sail.
Four sun sensors are installed at the end of the deployable solar panels to deliver data for the calculation of the solar vector for attitude control. Each of the two-axis sun sensors has a 150° field of view and a resolution of 2.7° creating an accuracy of +/-5° in the determination of the sun direction. Three single-axis gyros are used to keep track of the three-axis attitude of the spacecraft, each gyro working at a 0.012°/sec resolution.
Attitude actuation is accomplished through 90 by 22-millimter, 150-gram magnetic torque rods that are used to create angular momentum by running a current through coils in the presence of Earth’s magnetic field. The torquers are regulated by computers that control the current that is passing through the coils in order to control the force generated on each axis by processing data provided by a magnetometer. A momentum wheel is used to augment attitude control to adjust the slew rate of the satellite to ensure proper sun-pointing. The wheel assembly weighs 220 grams and is 75 by 65 by 38 millimeters in size with a nominal momentum of 0.05Nms supporting body rates up to 2.5°/sec.
Communications are accomplished through a monopole antenna that is deployed from the aft panel of the satellite. The CubeSat communications system is a standard piece of equipment operating at the 435MHz frequency for up and downlink. Comm is supported by two ground stations in the United States.
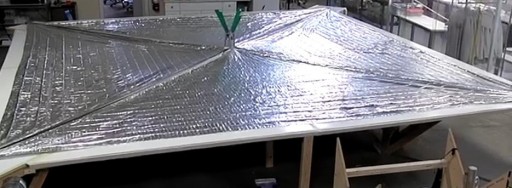
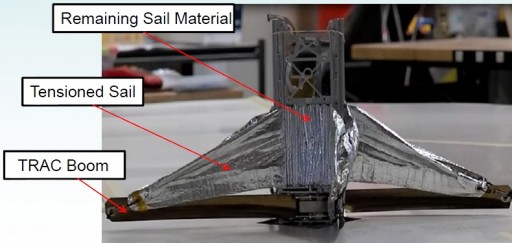
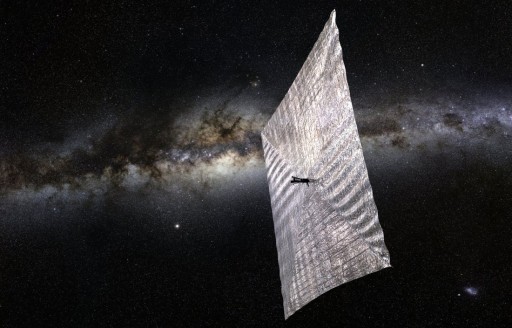
The solar sail is divided in four triangular segments making up a square sail with a deployed size of 5.6 by 5.6 meters for a total surface area of 32 square meters. The sail is deployed by four Triangular Rollable and Collapsible TRAC booms that are wound on a drum and deployed as the reel starts rotation to unwind the booms that consist of a specialty metal called Elgiloy. Each of the booms consists of two metal strips each formed into a c-shaped curve and laser-welded together back to back to form an inverted v-shape.
The four sail sections are stored in four wedge-shaped cavities on each of the four faces of the satellite. The sail itself is folded using a z-folding technique that folds the sail in two directions while varying the fold width from the center to the outside tips to create a wedge-shaped cross-section that matches the storage area on the satellite and ensures a clean deployment. The sail-to-boom connection consists of metal grommets in the sails and booms with split rings and extension springs that maintain the sail sections at tension when going through thermal cycles.
The four-meter long TRAC booms are supported by a spindle mounted between two plates with the booms clamped to the spindle and held in place by two bolts. Four tensioner assemblies and Delrin rollers support the controlled deployment of the booms, providing a normal reaction force against the booms at all times to keep them pinched and avoid interference between boom and deployer components, also guiding the booms at the exit of the deployer. Rocker arms are used to deflect flexure springs during boom winding with the flexures sticking out to allow the booms to exit at the corners.
As the booms are unwound by the boom drive motor (brushless DC motor) with associated gear train, each pulls out a section of the sail. As the booms reach full deployment, the sail sections are unfolded to reach the full deployment of the sail. The process of deploying the sail is documented by the cameras installed on the solar panels.
The solar sail itself consists of 4.5-micrometer thick mylar film that is aluminized and seamed for rip-stop protection. This is the thinnest sail to be deployed in space. Thrust force is generated by the interaction of the sail with solar photons, generating a minute thrust component, that – when properly directed – can be used to impart changes in the spacecraft’s velocity.
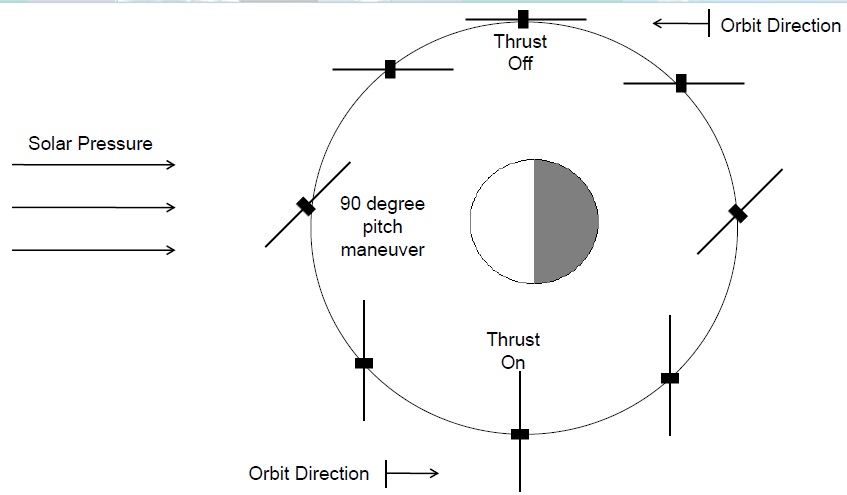
For the LightSail project, the first mission will only demonstrate the deployment of the sail and the operation of the attitude control system of the spacecraft in an orbit where drag dominates over the thrust force generated by the sail. LightSail-B will be flying over 800 Kilometers in altitude where the thrust force its expected to be ten times stronger than drag acting on the satellite for an actual demonstration of ‘solar sailing.’
For that, the satellite will complete a regular series of 90-degree pitch maneuvers to orient the solar sail to face the solar pressure whenever a positive thrust component is desired to modify the orbit of the craft. Precise accelerometers will be used to measure the acceleration supplied by solar pressure to be able to learn more about the feasibility of this propulsion technique.