ChubuSat-1

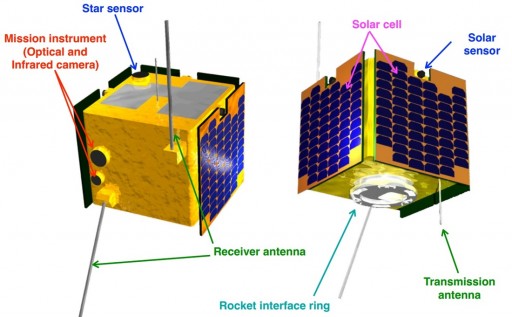
ChubuSat-1, informally called Kinshachi, is a microsatellite project of Nagoya and Daido Universities and several aerospace companies located in the Chubu region of Japan. The mission demonstrates a cost-effective satellite platform and an imaging payload that will make observations of Earth in visible and infrared wavelengths, track space debris and serve outreach purposes by relaying messages via the amateur radio bands.
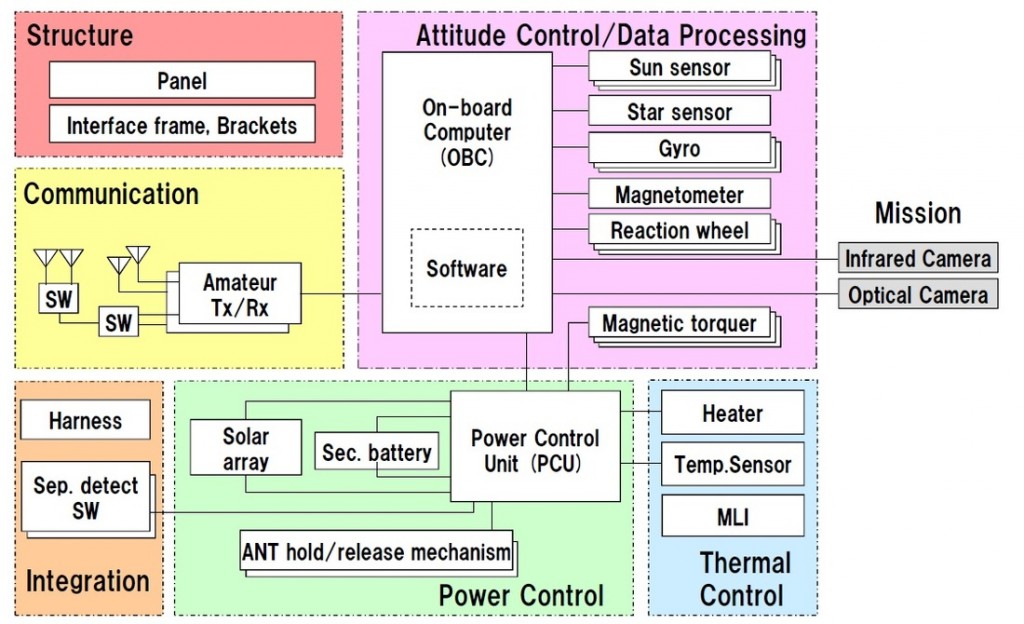
The spacecraft utilizes a standardized modular satellite bus that is 58 by 55 by 50 centimeters in size with a launch mass of around 50 Kilograms, designed to operate in orbit for six months to one year. The satellite uses an aluminum skeleton with internal and external honeycomb panels to create a lightweight but stiff structure.
Three of the external panels host triple-junction gallium-arsenide solar cells for a total of 60 cells per panel operated in three strings for a total power output of 100 Watts. Control of the power system is provided by a Power Control Unit which delivers generated power to a NiMH battery that consists of five strings with a total capacity of 9.5 Amp-hours. The PCU also conditions the satellite’s power bus at 28 Volts with an operational range of 23 to 36 Volts – from this non-regulated bus, the PCU generates voltages of 5, 12 and 15V for use by the various electronics. The PCU controls the state of charge of the battery, distributes power to all subsystems, shunts power from the solar panels and provides housekeeping data to the onboard computer.
ChubuSat-1 uses passive thermal control in form of blankets and insulation in combination with heaters that are used to maintain an operational thermal environment for the main components of the satellite.
The spacecraft is three-axis stabilized using reaction wheels and magnetic torque rods. Navigation sensors employed by the satellite is one Star Tracker, three sun sensors, a three-axis magnetometer, and three Fiber-Optic Gyros to measure body rates.
The spacecraft is controlled in a two-axis stabilization mode using only the torque rods during safe mode and initial de-tumble/attitude acquisition with an attitude error of under five degrees. Three-axis control is accomplished through the reaction wheels with a pointing accuracy better than 0.8 degrees. Regular momentum dumps from the reaction wheels are done by de-spinning the wheels and countering the resulting torque using the magnetic rods.
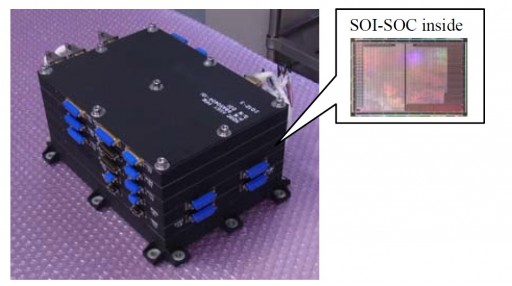

The data system of the satellite uses SpaceWire interfaces to connect the various controllers to the Onboard Computer which consists of three modules – a Central Processing Unit, an interface unit and a power supply. The OBC is 27 by 21 by 13 centimeters in size weighing 5 Kilograms including Attitude and Orbital Control Units, the Data Handling Unit interfacing with the payload, the main Data Recorder and the Command Decoder that interfaces with the communications systems.
The onboard computer provides self-check capability, regularly clears a watchdog timer, controls the satellite time, calculates the vehicle’s attitude and commands attitude actuators, processes housekeeping and payload data, provides failure detection and isolation and it also provides reprogramming capability.
The 32-bit central processing unit operates at 50 MIPS and includes 1 MB of EEPROM containing the boot code, 2 MB of SRAM, 64 MB of SDRAM and 512 MB of Flush ROM.
ChubuSat-1 uses a communications system operating at the amateur VHF/UHF frequencies reaching a data rate of 1.2 kbit/s for uplink and 9.6kbit/s for downlink. The comm system uses two amateur radio transceivers, a transmitter switch and a set of two receiving and two transmitting antennas. The receiving antennas are held in their launch position folded against the satellite body by a nylon wire that has a niochrome wire wound around it. Once separated in orbit, the PCU applies power to the niochrome wire that heats up and cuts the nylon wire to free the antennas that then spring into a deployed position.
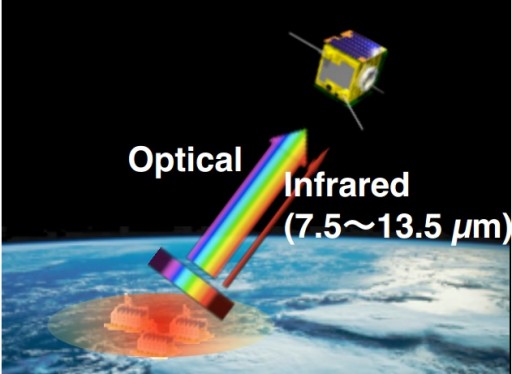
ChubuSat-1 carries two instruments – a visible-near infrared imager and a dedicated infrared imaging payload. The Visible Camera covers a spectral range of 400 to 800 nanometers to create full-color imagery using a CMOS detector of 2048 by 1536 pixels with a 3.5-micrometer pixel size. The imager has a narrow field of view of 2.15 by 1.61 degrees and achieves a ground resolution of ten meters. Built-into the payload is a 2 GB flash memory that stores acquired data.
The optical head of the camera is 18 by 7.5 by 7.5 centimeters in size and connected to an electronics box. Overall, the instrument weighs just under one Kilogram.

The Thermal Infrared Camera covers a spectral range of 7.5 to 13.5 micrometers using a bolometer array. The Bolometer Array Instrument is an uncooled infrared imager that does not rely on a cryocooler to keep the detector cooled. The array consists of 320 by 240 pixels. Each pixel on the array consists of several layers including an infrared absorbing material and a reflector underneath it that directs IR radiation that passes through the absorber back to the absorbing layer to ensure a near complete absorption. As IR radiation strikes the detector, the absorbing material is heated and changes its electrical resistance which can be measured via electrodes connected to each microbolometer and processed into an intensity read-out.
The TIR camera achieves a spatial resolution of 130 meters. Overall, the instrument weighs just 500 grams and is 8 x 8 x 15 centimeters in size. The TIR camera will be used to measure Earth surface temperature and to look for thermal signatures of orbital debris.