
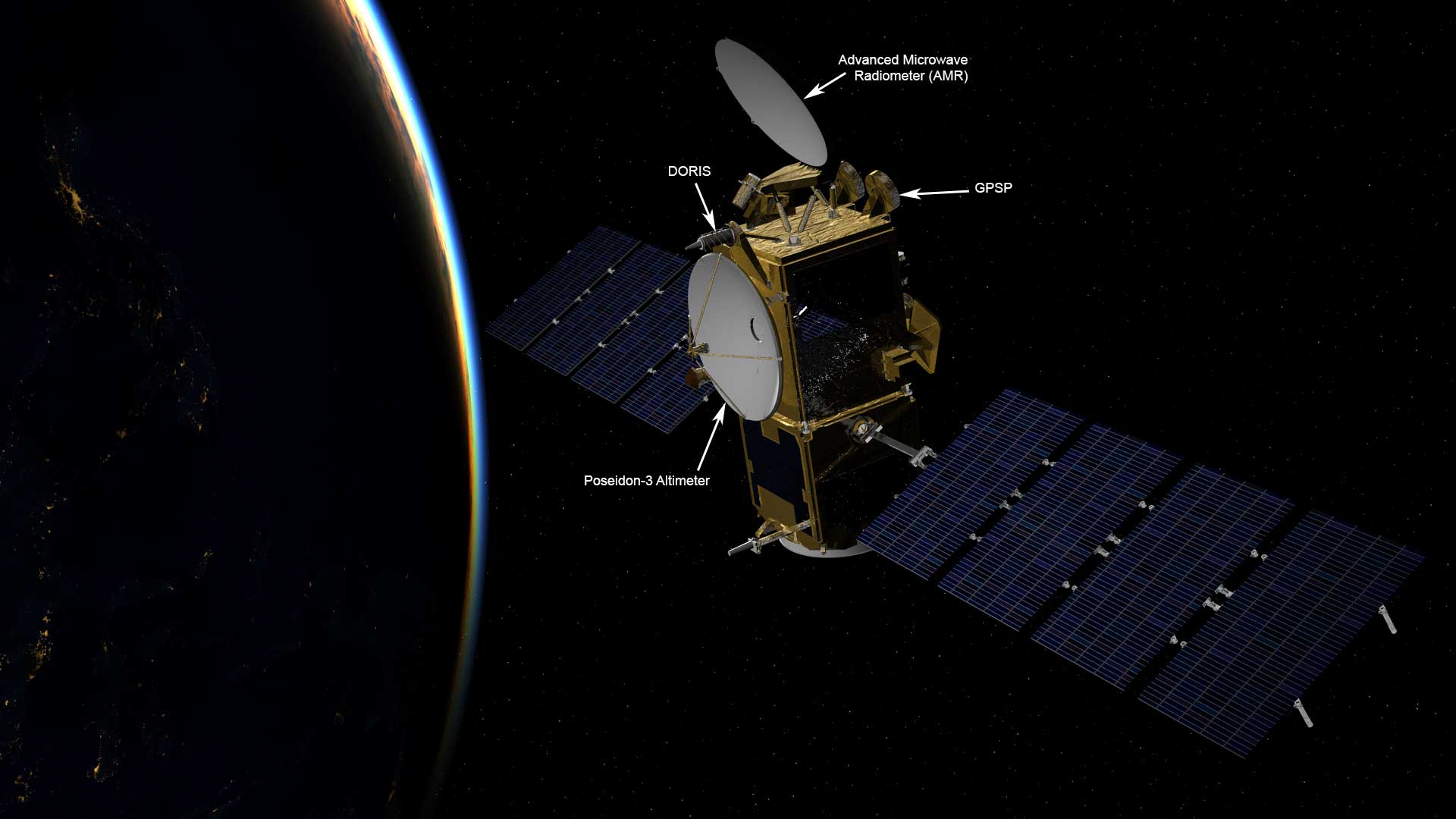
Jason-3 Spacecraft & Instruments
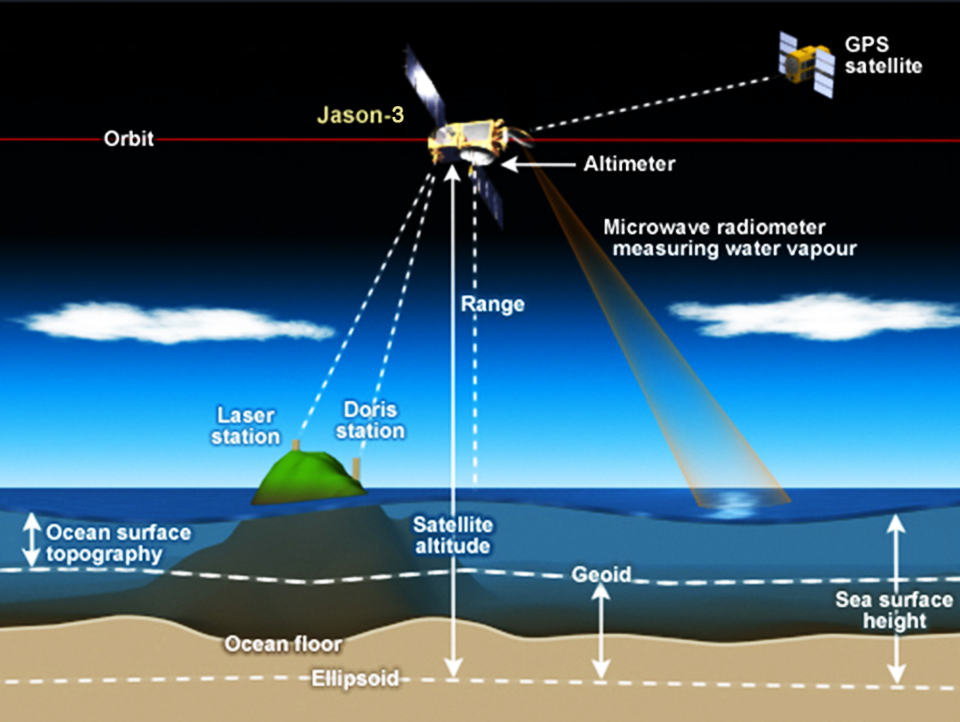
Jason-3 is an Ocean Altimetry Satellite in a U.S.-European satellite program to measure the height of the ocean surface.
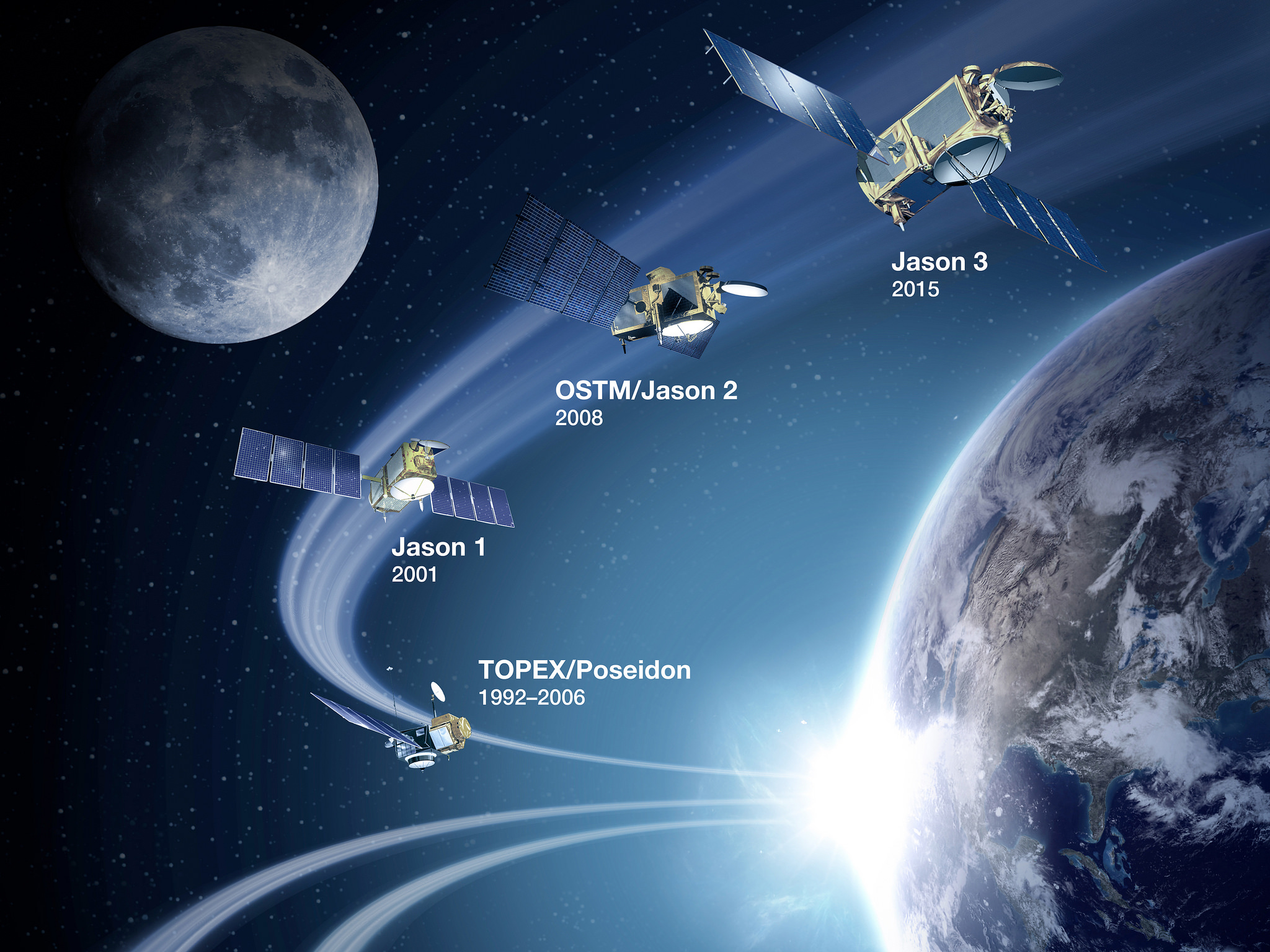
The major objective of the Jason-3 mission is to extend the timeline of ocean surface topography measurements that were started by the Topex/Poseidon satellite in 1992 and continued through Jason-1 launching in 2001 and OSTM/Jason-2 that has been in operation since 2008. The ocean altimetry measurements are of vital importance when following the global circulation patterns, sea level changes and climate implications in a constantly warming world.
The primary instrument on the Jason-3 mission is a radar altimeter that can measure variations in sea level over the global oceans with a very high accuracy of 3.3 centimeters.

Long-term and continual data of changes in the oceans is essential for both, operational applications and scientific research. Operational use of ocean altimetry data can in the forecasting of hurricanes and severe weather, tracking weather patterns as they traverse the oceans, forecasting surface waves for offshore operators, tide forecasting and tracking of currents to aide commercial shipping and shipping routes, and forecasting of weather phenomena such as El Niño and La Niña. The scientific benefits of a long-term measurement of ocean topography provides insights into climate change processes.
The Jason-3 project was approved in 2010 to ensure a continuation of measurements made by Jason-2 and its predecessors. Agencies involved in the mission are first and foremost NOAA on the U.S. side and EUMETSAT representing the European member states.
Inter-Agency Responsibilities
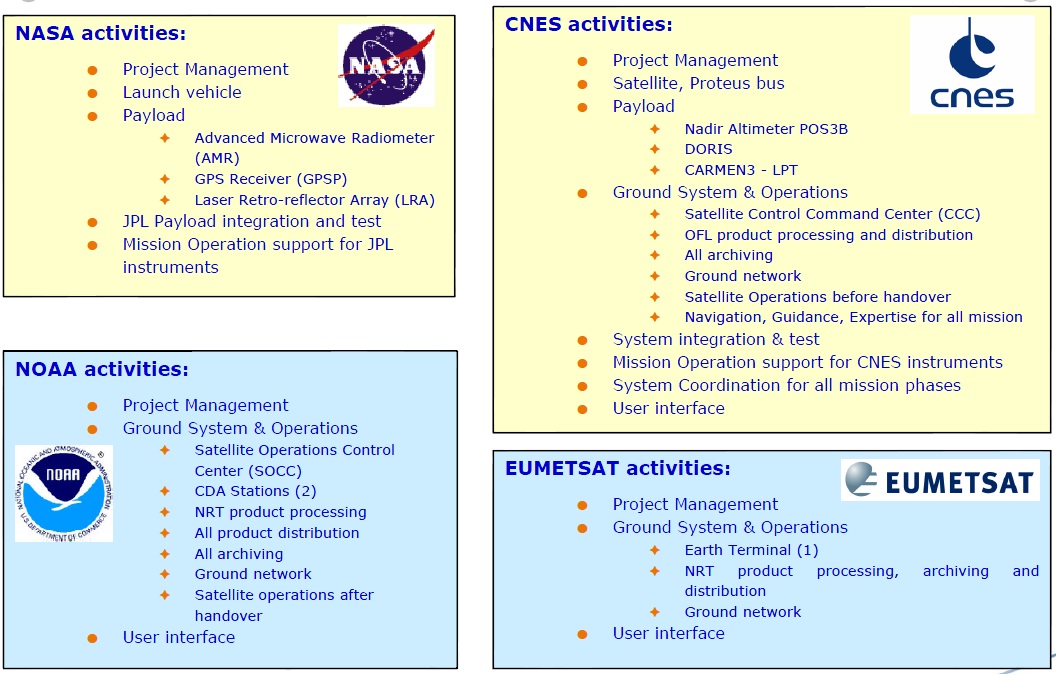
NOAA and EUMETSAT are the lead agencies of the mission, involved with the operation of the satellites, processing the instrument data, distributing data products and archiving data. The French Space Agency CNES is providing support on the technical level and acts as a systems coordinator. The technical support provided by CNES includes making available the Proteus satellite bus used by Jason-3. NASA is in charge of supporting science team activities, delivering instruments and procuring the launch services for the mission.
The Jason-3 mission has the primary objective of continuing the ocean topography measurements started in 1992, but it also facilitates a shift from a separation between spacecraft dedicated purely to scientific observations and operational applications to a combination of the two in a single spacecraft. Moving satellite altimetry into routine operations such as Numerical Weather Prediction will require a tight cooperation and coordination by the international and multi-agency managers and data users. The change to a more operational than science-driven mission is also evident in NASA and CNES taking a back seat and leaving the conduct of mission to the operational agencies NOAA and EUMETSAT. Jason-3 is also part of a data exchange program between EUMETSAT and the Chinese National Satellite Ocean Application Service.
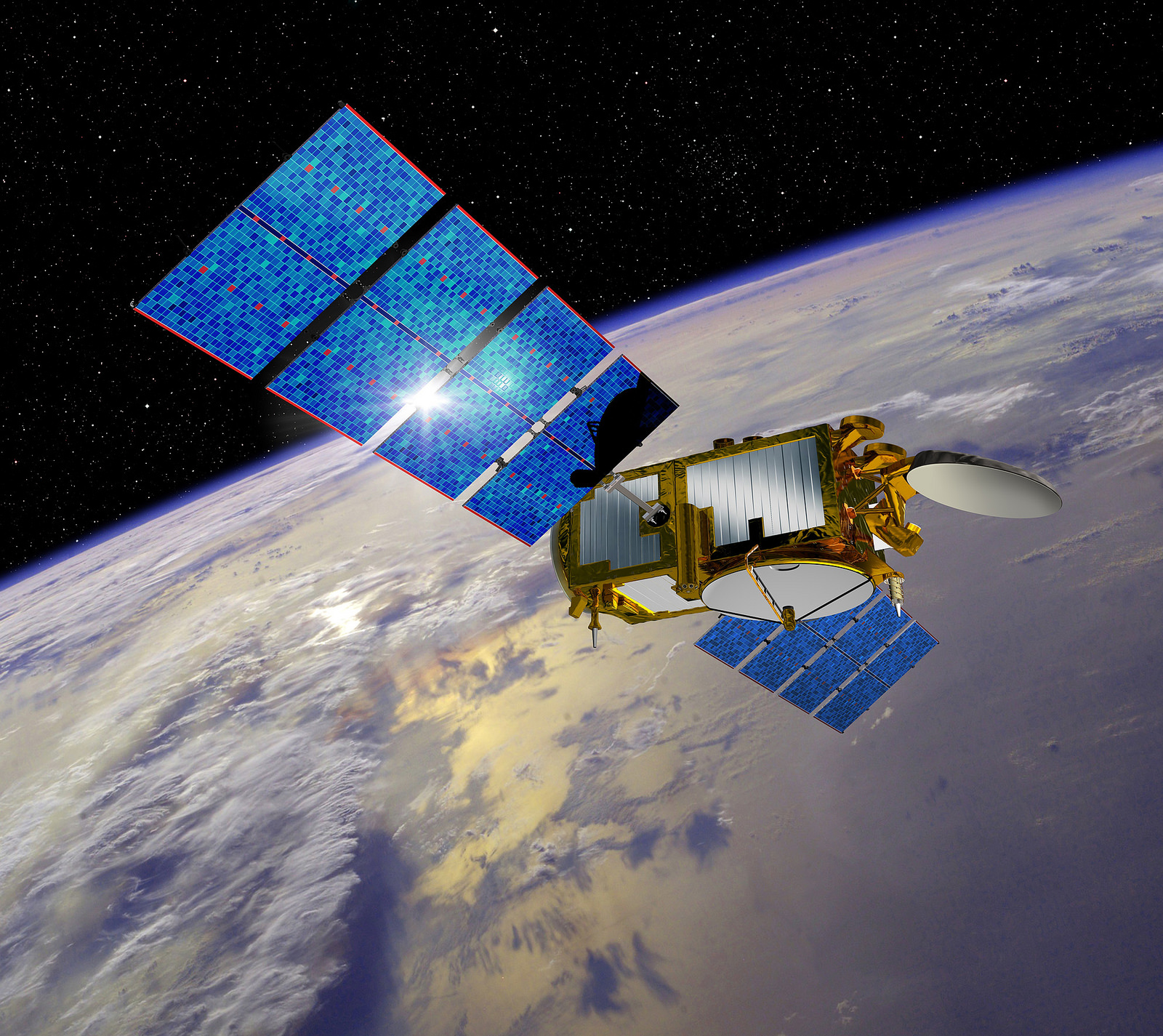
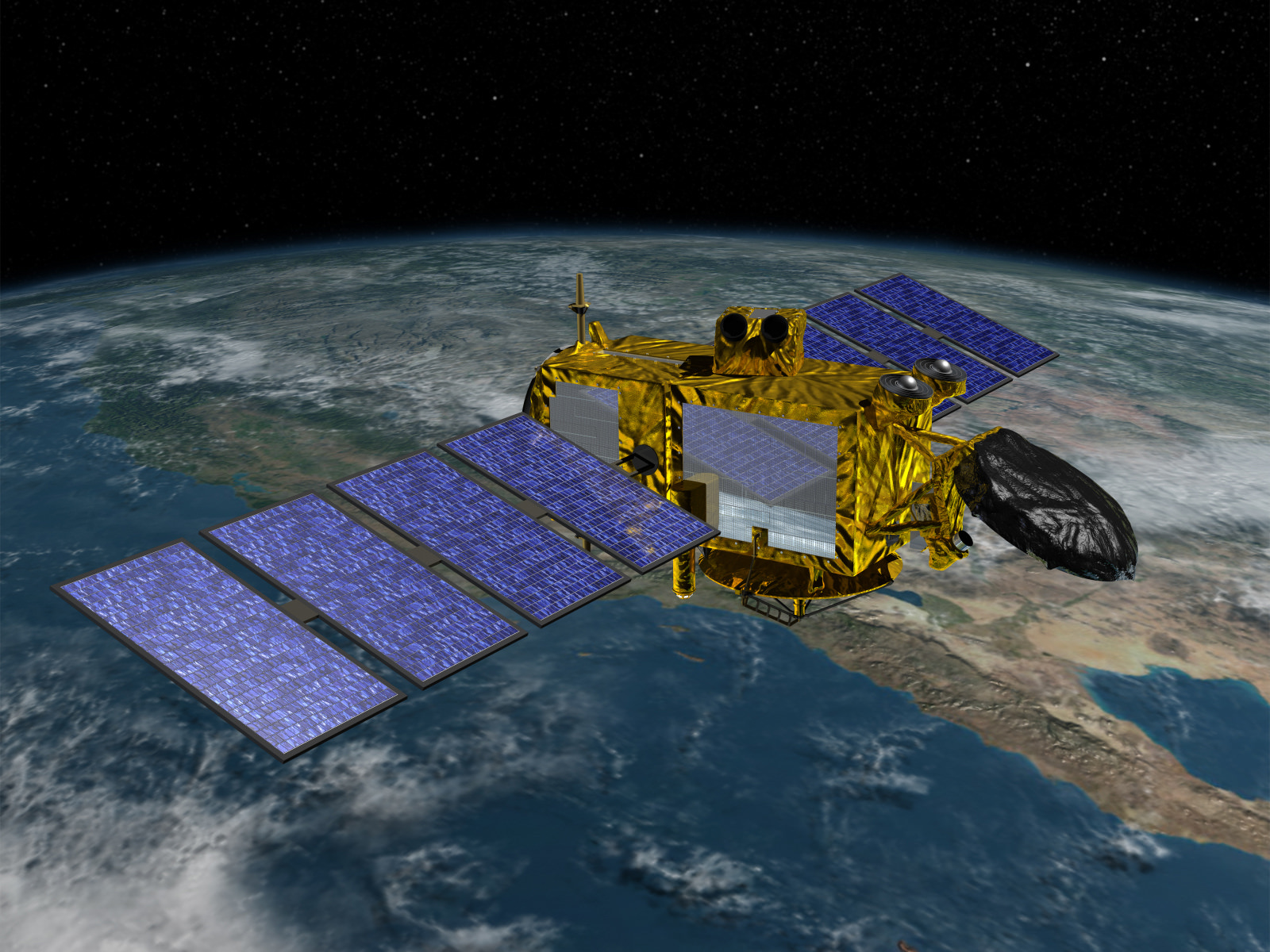
The Jason-3 mission and its spacecraft design follows very closely the development methodology and overall architecture of the Jason-2 mission, taking into account updates of hardware due to obsolescence, unavailability or modernization of systems. The Jason-3 spacecraft, like its predecessor, uses the Proteus satellite bus of CNES and Thales Alenia Space coupled with a payload module. The satellite payload consists of the same core instruments as Jason-2 – a Poseidon-class radar altimeter operating at the Ku/C-Band frequencies for the primary ranging measurement, a nadir-looking microwave radiometer operating in three frequency bands, an orbit determination package using GPS and the DORIS payload, and a laser retroreflector. Two additional instruments, radiation dosimeters from CNES and Japan, are also part of the Jason-3 satellite payload.
The Proteus satellite bus provided by Thales Alenia is designed for Low Earth Orbit Missions with light-payloads between 300 and 1,000 Kilograms. The satellite bus consists of a cubic platform hosting all required subsystems, measuring 1 meter per side.

Overall, the Proteus platform for Jason-3 has a dry mass of around 250 Kilograms and interfaces with a payload module of 255 Kilograms. Contained within a central spherical tank are 28 Kilograms of hydrazine, creating a total launch mass of the Jason-3 satellite of 525 Kilograms. The spacecraft is 3.8 by 10 by 2 meters in size when fully deployed in orbit.
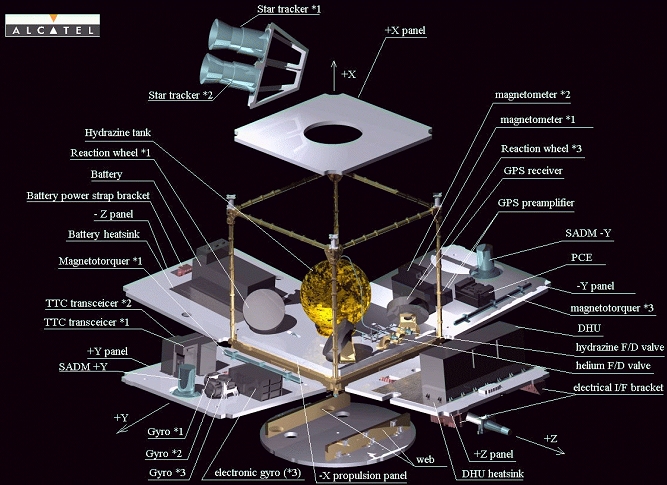
The Proteus satellite platform consists of an aluminum chassis to which honeycomb panels are mounted to provide attachment points for the various satellite subsystems. The satellite platform allows a payload assembly to be integrated in a modular fashion using four bolt interfaces. Thermal control relies on passive radiators with an area of 1.9m² along with a heater system to maintain components at their critical survival temperatures.
The satellite hosts two deployable solar arrays, each with four 1.5 by 0.8-meter panels covered with silicon solar cells to deliver a total power of 580 Watts. Each solar arrays has its own Solar Array Drive Mechanism to be able to track the sun and maximize the generation of electrical power. A Power Conditioning Unit receives power from the solar arrays and generates the satellite’s unregulated power bus at 23 to 37 Volts. Within the Power Conditioning Unit is a Digital Series Regulator that controls the state of charge of a 78 Amp-hour Li-Ion battery. Two identical power interfaces are run from the PCE to the Data Handling Unit where the power distribution function is centralized. A series of fuses and relays ensure bus protection inside the DHU and double isolation circuits upstream from the fuses provide further protection.

The Attitude Determination and Control System of the satellite is in charge of precisely calculating the satellite’s three axis orientation in space and using a series of actuators to orient the satellite to its nominal attitude, for Jason-3 a nadir Earth-pointed orientation. Attitude Determination uses a gyro-stellar concept – using three accurate two-axis gyrometers during the stabilization of the satellite, that is reducing body rates to a point where a pair of Star Trackers can begin to acquire attitude frames. The Star Trackers, installed on the Payload Module, use optical sensors to collect imagery of the star-filled sky that are then compared to known star constellations by an onboard algorithm for an accurate determination of the satellite’s orientation. Also part of the Attitude Determination System are eight Coarse Sun Sensors and two three-axis magnetometers which come into play during satellite safe modes and operation of the magnetic torquers.
The Jason-3 satellite uses reaction wheels as its primary attitude actuation mechanism. The reaction wheel assembly is a rotating inertial mass that is driven by a brushless DC motor that spins the wheel. When accelerating the wheel, the satellite body to which the wheels are directly attached will rotate to the opposite direction as a result of the introduced counter torque.

Because the reaction wheels have to be de-spun at regular intervals, the spacecraft requires a secondary mechanism capable of imparting controlled body rates on the satellite. Three Magnetic Torque Rods with redundant coils are used to create angular momentum by running a current through coils in the presence of Earth’s magnetic field. The torquers are regulated by computers that control the current that is passing through the coils in order to control the force generated on each axis. The magnetic torquers are used during momentum dumps and for attitude control in spacecraft safe mode. Actuation of the torquers is commanded based on readings from a three-axis magnetometer.
Overall, the Proteus satellite platform has a pointing accuracy exceeding 0.05 degrees.
The Data Handling Unit builds the brain of the satellite, hosting the onboard computer that runs the flight software to control all platform functions and handle data coming from the satellite payload. It is also responsible for failure detection and recovery, power distribution and command execution across the spacecraft. The main processor within the DHU is a MA 31750 and all interfaces between the DHU and the satellite payload use a 1553 link for commanding. Internal data speeds of up to 10Mbit/s can be supported by the satellite platform. All units within the DHU, including the main processor, are redundant. The satellite offers a mass memory of 2 Gbit to store payload data prior to downlink.
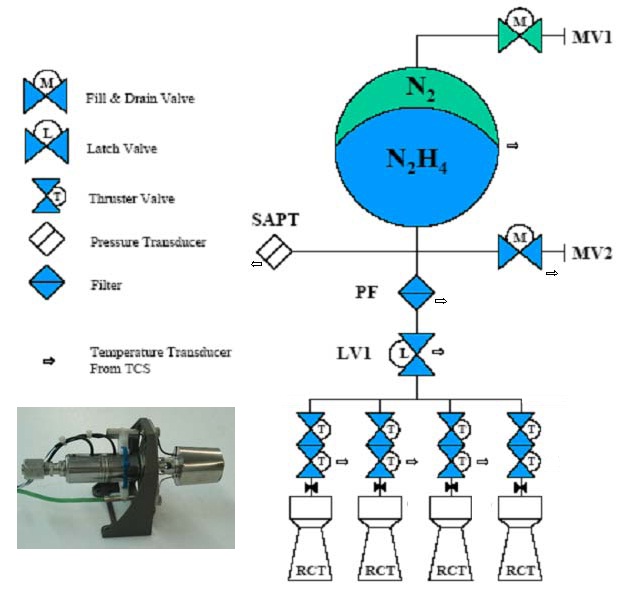
The Jason-3 satellite carries a total propellant load of 28 Kilograms of Hydrazine monopropellant, pressurized with Nitrogen prior to launch and operated in a blow-down mode, starting out at an initial propellant pressure of 22 bar. The propellant tank feeds a single bank of 1-Newton thrusters, each with its own set of valves. To generate thrust, the system makes use of the catalytic decomposition of Hydrazine over a heated metallic catalyst bed. All four thrusters are installed on the +X face of the satellite to be able to come to use in orbit adjustment maneuvers. The overall delta-v budget of the Jason-3 mission is slightly less than 120 meters per second.
The Communications System of the satellite employs a redundant set of S-Band transceivers interfacing with a pair of feedhorns with cross strapping between the antennas and transceivers as well as the Central Processing Module within the DHU. The S-Band system uses QPSK modulation and reaches a downlink data rate of 838 kbit/s and 4kbit/s for uplink.
Jason-3 Instruments
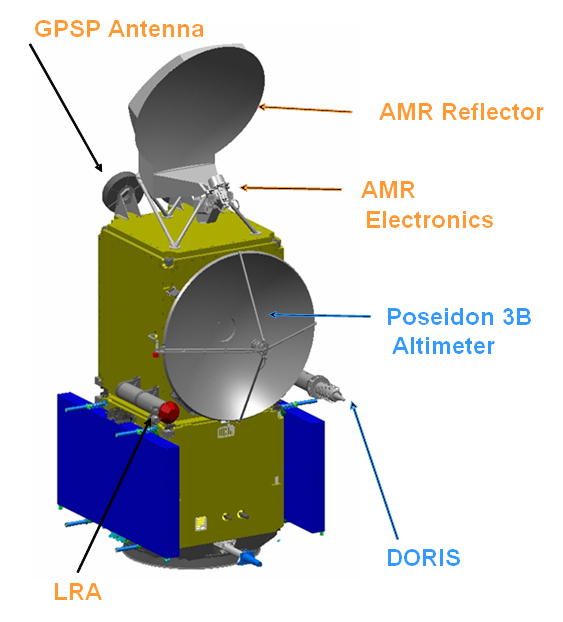
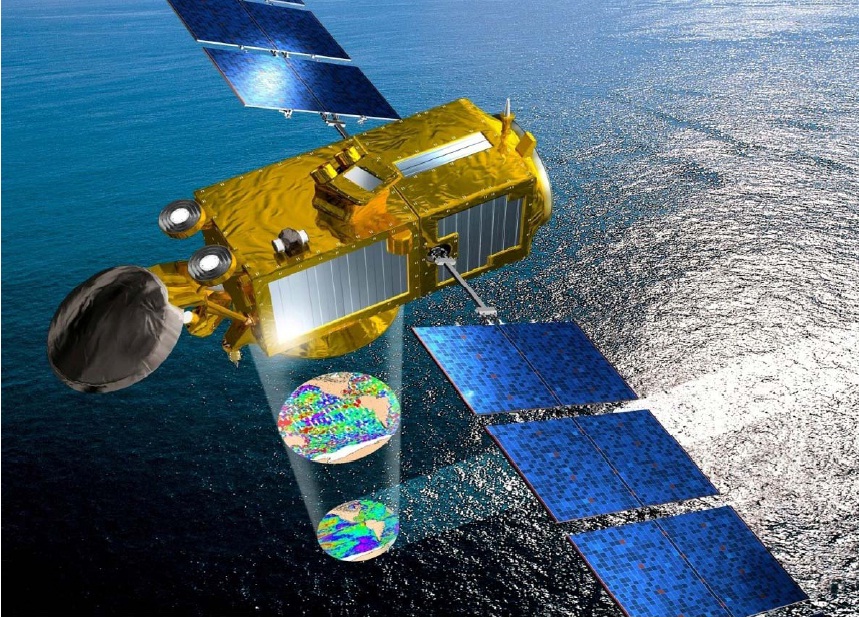
The Jason-3 mission’s primary instrument is the Poseidon-3B altimeter that provides the critical data continuity with the previous Jason missions while also improving measurement accuracy and instrument operation. Furthermore, the satellite hosts a passive microwave radiometer, known as Advanced Microwave Radiometer 2. The Precise Orbit Determination System, a laser retroreflector and a GPS payload are used to accurately determine the satellite’s location in orbit for proper geo-tagging of the collected data sets. Two passenger instruments hosted on the Jason-3 satellite are the Joint Radiation Experiment and the Light Particle Telescope.
The primary payload of the Jason-3 satellite combines an active and a passive instrument. The active radar pulses radio signals to the ground and records the radar echo which can yield information on Ocean typography while a passive microwave radiometer only records the ambient microwave emissions at the given wavelength range to deliver correction data accounting for atmospheric effects.
Poseidon-3B
Poseidon-3B, the primary instrument of the Jason-3 satellite, is a radar altimeter that precisely measures altitude above the terrain presently beneath the satellite by bouncing a radio wave off the ground and measuring how long it takes to return to the satellite. Recording the signal waveforms that return from the ocean surface allows the topography of the sea surface to be mapped and the ocean surface current velocity, wave height and wind speeds to be calculated.
The Poseidon-3B instrument has a mass of 70 Kilograms and requires 78 Watts of Power, hosting a radar antenna 1.20 meters in diameter. It operates at two transmission frequencies one in C-Band at 5.3 GHz and one in Ku-Band at 13.575 GHz, both using a bandwidth of 320 MHz. Each radar pulse is 105.6 microseconds in duration and Poseidon-3 employs an interlaced pulse pattern consisting of three Ku pulses followed by one C-Band pulse followed by three Ku pulses and so on, achieving a Pulse Repetition Frequency of 2060Hz.
Using a dual-frequency radar system allows processing to determine the atmospheric electron content which can affect the signal return time and in turn decrease measurement accuracy. The delay caused by free electrons is directly dependent on the radar frequency and using two different frequencies allows an easy calculation of atmospheric electron content. The dual-frequency system also permits rain events to be detected.
Poseidon-3B has a transmit power of 8 Watts at the Ku frequency and 25W for C-Band with corresponding antenna beamwidths of 1.28° and 3.4°. The receiving system employs solid-state power amplifiers to amplify the faint echo that is then digitized and sent to the Data Handling Unit at a data rate of 22.5 kbit/s. The instrument can only operate in a nadir-viewing mode, sampling at 30-Kilometer intervals in the along-track direction.
The Radio Frequency Unit used on Poseidon-3B is the same used on Jason-2 and the instrument Processing and Control Unit has been adopted from the SIRAL radar altimeter hosted by the CryoSat mission.
To expand on the capabilities of the previous Poseidon radar altimeters, the 3B version can be operated in an experimental mode that is designed to permit accurate measurements closer to coastal zones and for lakes and rivers. This function will use an open loop tracker in which the satellite-to-surface distance will be calculated with the altimeter using the real-time orbit position provided by the onboard navigator plus the elevation of the surface with respect to the GRIM5 geoid model stored in a Digital Elevation Model within the altimeter. Calculating the reception window beforehand using these models will allow a measurement in much smaller areas such as lakes and rivers.
Coupled with the improvements of the DORIS position determination system, Poseidon-3B can conduct measurements of ice surfaces.
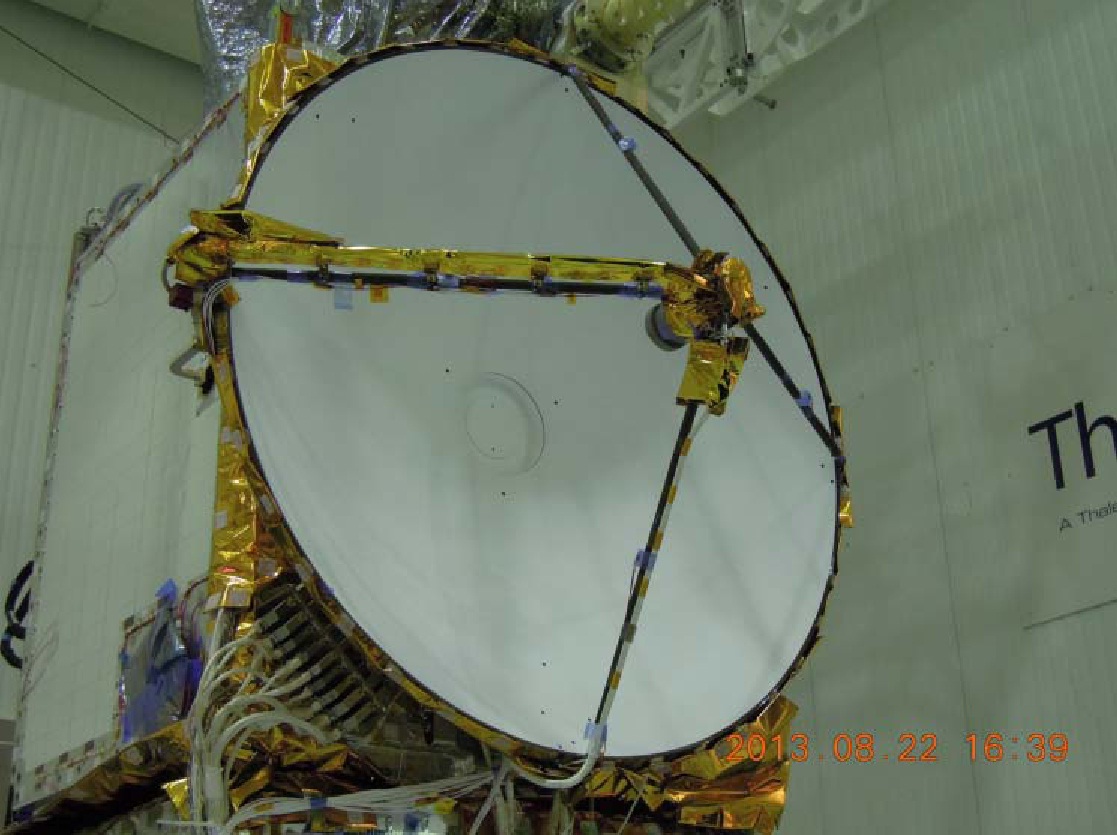
Advanced Microwave Radiometer 2 (ARM-2)

The Advanced Radiometer 2 instrument was funded by NOAA and developed at the Jet Propulsion Laboratory to deliver data for the correction and refinement of data delivered by the radar altimeter. ARM-2 measures the natural microwave emission from the atmosphere at characteristic wavelengths that allow it to measure the altimeter signal path delay caused by tropospheric water vapor.
AMR-2 passively measures the radiation brightness temperature in the nadir column beneath the spacecraft at three wavelengths – 18.7, 23.8 and 34 GHz.
These channels provide a measurement of tropospheric water vapor content for the correction of radar data. Brightness temperatures collected by ARM-2 are converted to path-delay information relevant to the processing of radar instrument data.
The primary water vapor channel is the 23.8GHz frequency while the 34 GHz channel provides a correction for non-raining clouds and the 18.7 GHz channel delivers the correction for the effects of wind-induced enhancement in the sea surface background emission.
The AMR-2 radiometer system is comprised of the Electronics Structure Assembly and a Reflector Structure Assembly installed on the forward facing panel of the payload assembly.
.
DORIS – Precise Orbit Determination System
The DORIS system uses a ground network of 60 orbitography beacons located all over the globe. These beacons send out signals at two frequencies which can be received by a satellite. Because the satellite moves at a fast speed, it causes a Doppler shift in the signal frequency that can be detected and used to calculate the satellite’s velocity when the two frequencies are precisely known. Collecting several measurements of the satellite’s velocity over different beacons allows data to be assimilated and used in orbit-determination models to constantly re-calculate the satellite’s orbit and its position with an accuracy of three centimeters. Precise knowledge of the satellite’s position above Earth is critical for proper geo-locating the radar and radiometer data.
The DORIS instrument aboard the Jason-3 satellite hosts a new generation DGXX-S receiver that builds on lessons learned from the Jason-2 mission. Improvements in the calculation model include the solar panel position as well as the albedo and infrared pressure effects on the satellite at different solar panel settings. A number of prediction models such as Ultra-Stable Oscillator frequency drift and along-track acceleration are being used on the newer system for more accurate calculations of satellite position.
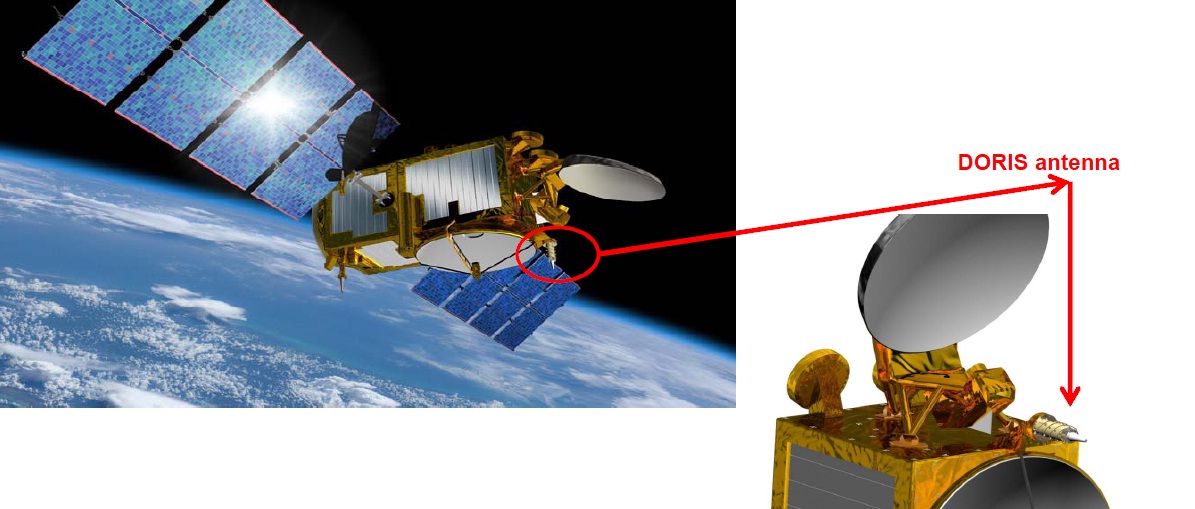
DGXX-S consists of a dual-frequency omni-directional antenna and a twin receiver that performs Doppler measurements and receives auxiliary data from the beacons. The system includes two Ultra-Stable Oscillators to deliver timing solutions. DGXX-S allows seven channels to be tracked simultaneously to achieve an accuracy of 3 millimeters in the range measurement. The system is relatively compact in size with a mass of just 1.15 Kilograms compared to first generation systems that weighed in at 18 Kilograms.
GPS Payload

The GPS receiver of the Jason-3 satellite works in the same way Earth-based terminals determine their position through triangulation. Receiving navigation signals from at least three GPS satellites in Medium Earth Orbit, the system can measure the difference in signal arrival time from the satellites and so calculate its precise position in orbit. The GPS system has the main advantage over the DORIS system in being continuously available for the tracking of the satellite’s trajectory and position in orbit.
The GPS payload can simultaneously process signals from up to 16 GPS satellites to achieve a phase measurement accuracy of one millimeter and pseudo-range measurements to within 10 centimeters. Overall, data delivered for satellite positioning will be accurate to 50 meters and 50 nanoseconds.
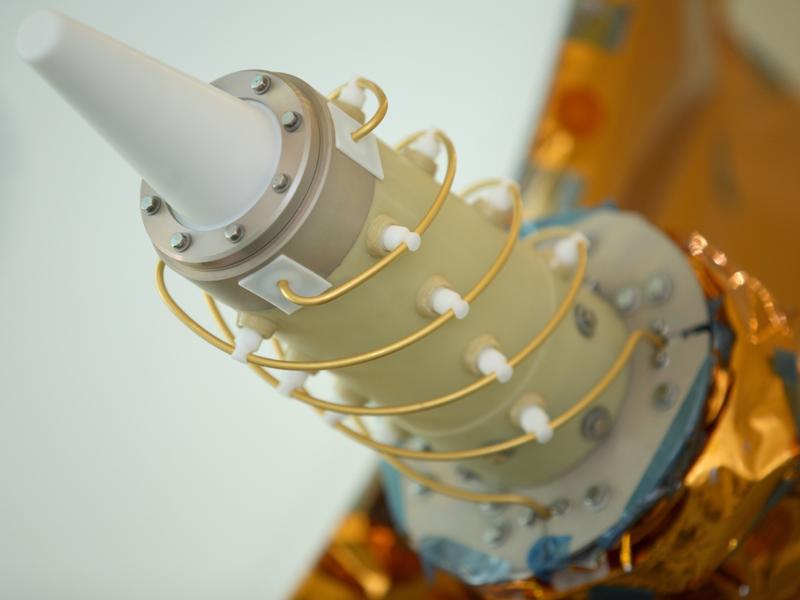
Laser Retroreflector Array (LRA)

The Laser Retroreflector serves as a reference target for satellite laser ranging measurements which are needed as another means of precisely determining the satellite’s orbit. The LRA also comes into use for the calibration of the altimeter, completed at regular intervals. It resides on the nadir side of the spacecraft and hosts nine quartz corner cube arrays as a truncated cone – one corner cube reflector resides in the center while the other eight are distributed azimuthically around the cone. This arrangement permits laser ranging at all angles of a 360-degree field of view in azimuth and 60° in elevation. The individual reflectors have been optimized for a wavelength of 532 nanometers (green visible light) and offer a field of view of 120 degrees. The entire reflector assembly, a passive payload, has a mass of 2.2 Kilograms.
Using laser ranging, the satellite altitude can be determined to within a few millimeters, making this system the most accurate orbit determination tool aboard the Jason-3 satellite. Though, laser ranging is not available continuously and therefore other systems that are more easily in operation and require less support are used on the satellite. Laser ranging is only supported by few ground stations worldwide and weather plays a considerable factor for this type of altitude measurement.
Joint Radiation Experiment
The Joint Radiation Experiment consists of two components, the CARMEN radiation dosimeter and the Light Particle Telescope.

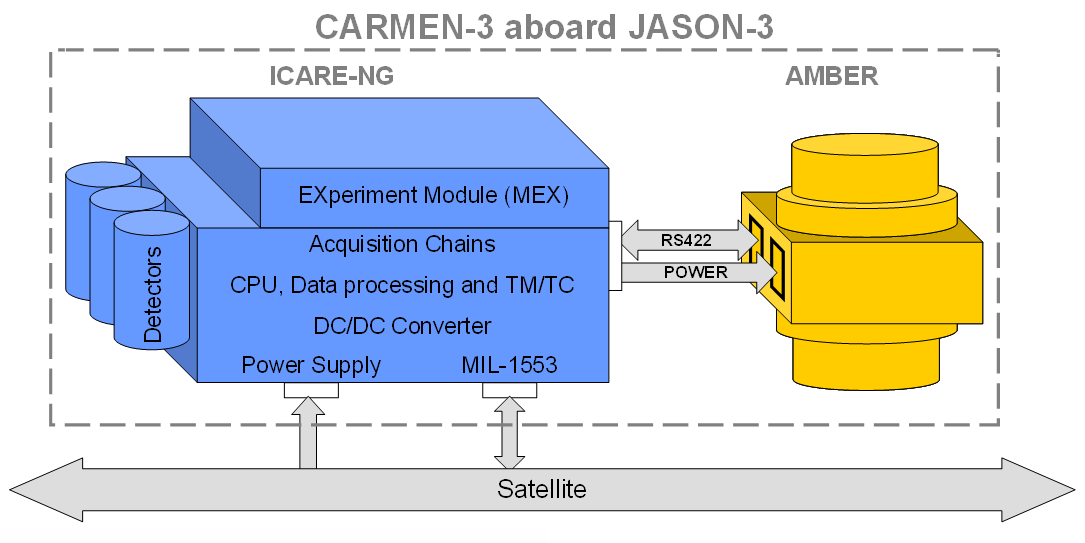
CARMEN stands for ‘CARacterization and Modeling of ENvironment’ and is an instrument dedicated to the measurement of the space environment, taking into account low and high-energy particles as well as orbital debris. The system includes two sensors, ICARE-NG and AMBRE. The ICARE-NG instrument studies the influence of the radiation environment in space on modern electronics while AMBRE measures low-energy ions and electrons and their effects in electrostatic discharges on spacecraft.
ICARE-NG can measure electrons at energies of 1.6 to 3.6 MeV and protons from 27 to 292 MeV while AMBRE covers the lower proton and electron energies of a few eV to 30 keV. ICARE-NG furthermore measures total dosimetry and dose effects on electronic components, looking at destructive single events and non-destructive events with a time resolution of one second.
The current state of radiation models with respect to the effect of radiation on electronics which are based on electronics standards from the 1970s and 80s and computational resources from the same period. Modern electronics are completely different in architecture, much smaller, faster and more complex than the systems of three decades ago. Prediction models for modern electronics require verification and calibration in an actual space environment with its characteristic particle inflow and particle energies.
For the Jason-3 mission, data delivered by CARMEN will be used to correlate any drifts in instrument readings or upsets in the electronics with the local radiation environment with particular focus on the South Atlantic Anomaly.
ICARE-NG is 20 by 12.2 by 11.2 centimeters in size, weighs 2.8 Kilograms and requires a peak power of 13 Watts. It delivers 4.32MB of data per day. The AMBRE system is 20.6 by 14.2 by 13.4 centimeters in dimensions and weighs 2.5 Kilograms, creating 3.09MB of data per day.

The Light Particle Telescope has been developed by the Japan Aerospace Exploration Agency and complements the in-space radiation measurements. It is comprised of two units referred to as LPT-E and LPT-S. The LPT-S sensor delivers data on the electrical interference with the Jason-3 satellite while the LPT-E system is comprised of four sensors for the measurement of different particles. The ELS-A sensor uses four Solid State Detectors to measure electrons at energies between 22 kilo-Electronvolt and 1.2 MeV along a +/-10° field of view. ELS-B also counts electrons but uses a combination of a Solid State Detector and a Scintillator coupled with a Photomultiplier for the detection of electrons at higher energies up to 19 MeV.
The APS-A sensor uses three Solid State Detectors to sense protons up to 33 MeV and other heavy particles up to several dozen MeV while APS-B covers an even higher energy range, detecting protons up to 230 MeV. Each of the four LPT sensors has its own preamplifiers, high-voltage supplies and analog-to-digital converter electronics for the readout. The main controller of the payload resides on LPT-E and controls all functions of the LPT payload including the transmission of telemetry and science data to the satellite for downlink.
Jason-3 Orbit
The Jason-3 satellite targets an operational orbit at 1,326 by 1,380 Kilometers in altitude, inclined 66.05 degrees to cover all major ocean areas. This non-synchronous orbit has a period of 112 minutes and creates a 9.9-day repeat cycle (127 orbits) with a ground track repeatability of +/-1 Kilometer at the equator. This orbit design has a –2° drift per day in the orbital plane with respect to the inertial reference frame.
