
Chang’e 5 Spacecraft Overview
Chang’e 5 is China’s first lunar sample return mission and the most ambitious endeavor in the country’s lunar program, aiming to introduce completely new technologies and techniques such as a fully automated rendezvous in lunar orbit and sample transfers in between different spacecraft modules. As of 2014, Chang’e 5 was planned to launch in 2017 with its follow-up mission, Chang’e 6, planned two years later.
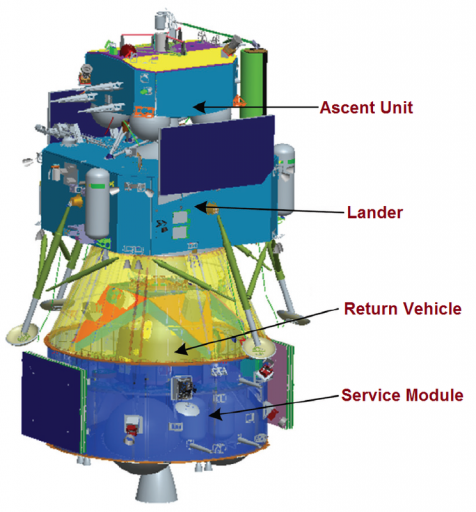
The Chang’e 5 spacecraft consists of four modules – a Service Module, a Return Vehicle, the Lander and the Ascent Vehicle. Overall, the spacecraft will have a launch mass around eight metric tons requiring a larger launch vehicle than previous missions. It is expected that Chang’e 5 and 6 will launch on the Long March 5 rocket that delivers the craft to a direct trajectory to the Moon.
The Chang’e 5 Service Module includes all systems to support the assembled vehicle on the way to the Moon, remain in lunar orbit for an extended period of time while surface operations are in progress, rendezvous with the ascent vehicle in orbit and support the Return Vehicle during the transfer back to Earth, setting up for re-entry.
The Service Module is equipped with power-generating solar arrays, communication systems for command uplink from Earth and telemetry downlink as well as a propulsion system and attitude control thrusters. Likely based on propulsion technology already used on Chang’e 3, the vehicle will use hypergolic propellants consumed by a throttlable engine (likely the 7.5kN engine used on Chang’e 3). The propulsion system of the Service Module would be used to conduct trajectory correction maneuvers on the way to the Moon, the lunar orbit insertion burn, orbital maintenance and the trans-Earth injection burn at the end of the mission.
The Service Module directly interfaces with the Return Vehicle that is installed in a cavity of the Service Module to reduce the overall length of the vehicle.
The Return Vehicle closely resembles the Shenzhou-capsule design in a scaled-down version. It is equipped with a modified heat shield to be able to withstand the re-entry into Earth’s atmosphere at speeds of 11 kilometers per second. Landing is accomplished using parachutes that are deployed during atmospheric flight, starting with a drogue followed by the main Chute. The Return Vehicle includes a thruster system to actively control its orientation before re-entry and modify its re-entry path by adjusting aerodynamic lift to target a reasonably sized landing zone. Onboard measurement systems and communication beacons for the location of the landed vehicle are also part of the entry vehicle.

The Chang’e 5 lander in its structure is identical to the Chang’e 3 lander successfully demonstrated in 2013 with the obvious exception of ascent vehicle accommodations and surface sampling equipment that were not tested by Chang’e 3.
The lander has a dry mass of over one metric ton and a fueled mass of up to 3,800 Kilograms. Four primary landing legs are installed on the lander using a cantilever-type design with bumpers and interior buffer elements in the primary struts and multi-functional secondary struts that interface with the bottom panel of the lander. The legs will have to create a sufficiently soft landing after the main engine is cut off around four meters above the lunar surface.
The propulsion system will also be similar to that used by Chang’e 3 consisting of a main engine that can be throttled from 1.5 to 7.5 Kilonewtons to conduct a single continuous landing burn. Attitude control is provided by 28 thrusters providing thrust levels of 10N and 150N for three-axis control during orbital flight and the landing sequence. Power is delivered by two solar arrays that can be opened and closed on command. Navigation will be provided by an inertial guidance platform, a laser ranging system, an altimeter and an optical descent camera.
The Ascent Vehicle resides on the top deck of the lander using structural attachments to remain in place during orbital flight, landing and the surface mission. A central interface from the lander to the Ascent Vehicle is attached at the top of the vehicle using an arm that can be moved to the side to clear the way for the vehicle to launch from the top deck of the lander.
This interface includes electrical and data interfaces since the Ascent Vehicle will leave its two solar panels in a stowed configuration for the flight to the Moon and the surface mission. The interface also facilitates the sample transfer mechanism.
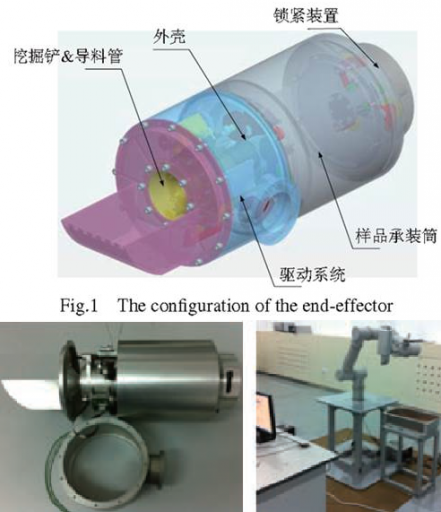
According to information published in Chinese papers, Chang’e 5 will use a four-degree of freedom robotic arm for the acquisition of regolith samples and small rocks that are delivered to the Ascent Unit by the robotic arm. The end effector of the arm includes a scoop for the acquisition of samples, a sample processing system using vibration and separation mechanisms that ensure that several individual samples can be acquired without coming in contact with each other. The entire End Effector containing the samples can be separated from the arm for the transfer to the Ascent Vehicle.
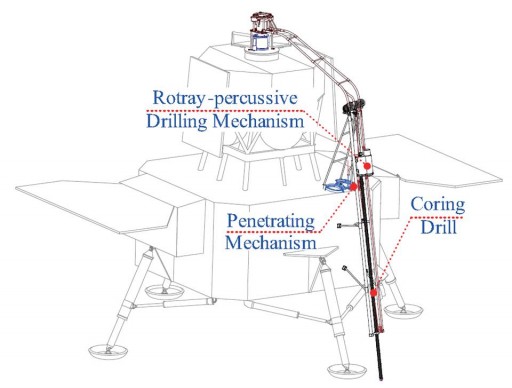
Additionally, the lander includes a coring drill and penetrating mechanism that will acquire one or more drill samples in the form of an intact core up to a depth of two meters making use of a rotary-percussive drilling mechanism. The drill core is delivered to the Ascent Vehicle inside a Kevlar tube that provides sufficient stability to protect the core while being flexible enough to be compacted in size for transfer to the Ascent Vehicle.
The Ascent Unit includes a main propulsion system built around a central main engine that is fired to lift off from the lunar surface, carrying the samples back into lunar orbit to link up with the Service Module – Return Vehicle stack using rendezvous sensors developed for the Shenzhou spacecraft including laser ranging and optical sensors.
The docking is accomplished using a claw-type docking mechanism. On the active side, three claws (spaced 120°) close when coming into contact with the passive side of the system that includes struts to be grasped by the claws to create a firm bond between the Ascent Unit and the Return Vehicle. The samples are then transferred to the Return Vehicle using a robotic system of currently unknown specifications.
After sample transfers are complete, the Ascent Unit is separated so that the Service Module can boost the vehicle out of orbit and carry the Return Vehicle back to Earth.
Chang’e 5 Mission Profile
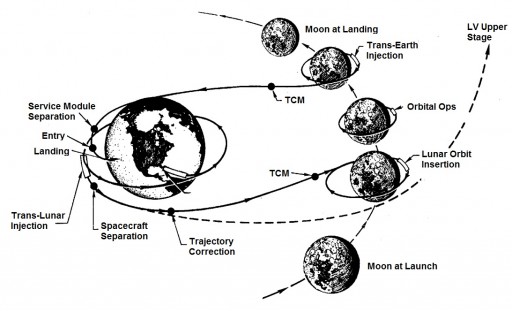
The eight-metric-ton Chang’e 5 stack will complete a complex mission that consists of eleven different phases and spacecraft configurations. The vehicle will be launched by a Long March 5 rocket blasting off from the Wenchang Satellite Launch Center that has recently finished construction. Delivered to a trans-lunar trajectory, the Service Module would perform adjustment maneuvers as needed to set up the appropriate conditions for lunar orbit insertion five days after launch.
The Service Module would be in charge of placing the stack into a circular orbit around the Moon at an altitude 200km (it is likely that a polar orbit will be used, similar to Chang’e 3). In that orbit, the Lander – Ascent Vehicle stack will separate from the Service Module in a one-time separation event likely using pyrotechnics. The Lander would use its own propulsion system to lower the periapsis to 15 Kilometers in advance of landing with the periselene location carefully positioned to line of with the landing site.
Landing will take place at the beginning of a Lunar Day (14 Earth days in duration).
The Lander will make one continuous landing burn using its main engine that actively throttles down as part of the descent. The 700-second landing sequence begins with a deceleration that takes the vehicle from 15 to 2 Kilometers in altitude transitioning to a quick Adjusting Sequence to move from horizontal flight to a vertical descent.

Coarse obstacle avoidance is completed before horizontal velocity is eliminated, setting up for a Hover Segment at 100 meters for image acquisition and fine-obstacle avoidance followed by a constant-velocity descent. At an altitude of four meters, the Lander will shut down its engine and drop to the surface.
It is likely that the aim of the mission is to complete all sampling and drilling operations within one lunar day to avoid risking hardware damage as a result of the harsh temperatures of lunar night. After sampling and transfers of up to 2 kilograms of lunar material to the Ascent Vehicle is complete, all preparations for the return journey will be completed.
The Ascent Vehicle will then use its propulsion system to ascend into an orbit of 15 by 180 Kilometers and further raise its orbit and complete a fully autonomous docking with the Service Module – Return Vehicle stack.
Sample transfers to the Return Vehicle take place in lunar orbit before the Ascent Unit undocks for a Free Flight in lunar orbit of at least ten days.
The Service Module would then conduct the trans-Earth insertion for a five-day flight back to Earth. 5,000 Kilometers from Earth, the Return Vehicle would separate from the Service Module for the final 20 minutes to re-entry.
Re-entering at a speed up to 11 kilometers per second, the Return Vehicle would utilize a Skip Re-Entry that increases re-entry range, reduces the overall G-load on the vehicle and significantly reduces the thermal stress on the heat shield. Requiring precise guidance, a Skip Re-Entry consists of an initial dip into the atmosphere to reduce the velocity of the spacecraft that performs a pull-up maneuver to depart the atmosphere again and continue on a ballistic sub-orbital trajectory leading up to a subsequent entry into the atmosphere at a reduced speed for an atmospheric descent and a parachute-assisted landing.
